6.2 Motion Command Details
6.2.3 Zero Point Return (ZRET)
6-24
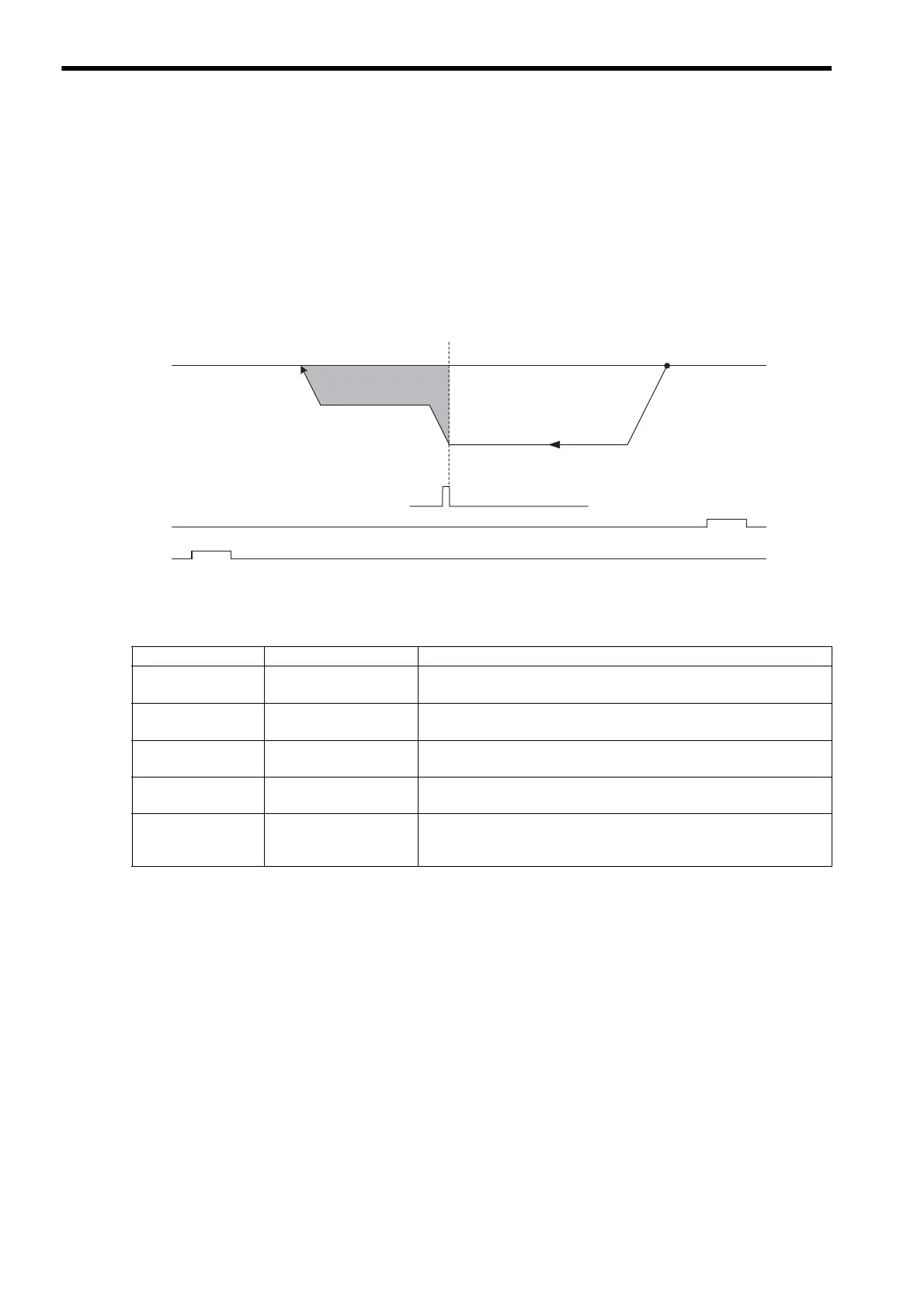
[ d ] C Method (OW3C = 3)
Operation after Zero Point Return Starts
Travel is started at the approach speed in the direction specified in the parameters.
When the rising edge of the phase-C pulse is detected, the speed is reduced to the creep speed and positioning is per-
formed.
When the positioning has been completed, a machine coordinate system is established with the final position as the
zero point.
The moving amount after the phase-C pulse is detected is set in the Zero Point Return Travel Distance (OL42).
If an OT signal is detected during the zero point return operation, an OT alarm will occur.
* 1. The SERVOPACK P-OT signal.
* 2. The SERVOPACK N-OT signal.
Setting Parameters
Parameter Name Setting
OW3C
Zero Point Return
Method
3: Phase-C Method
OW09, Bit 3
Zero Point Return
Direction Selection
Set the zero point return direction.
OL3E
Approach Speed
Set the speed to use when starting a zero point return.
Only a positive value can be set; a negative value will result in an error.
OL40
Creep Rate
Set the speed to use after detecting the phase-C pulse.
Only a positive value can be set; a negative value will result in an error.
OL42
Zero Point Return Travel
Distance
Set the travel distance from the point where a phase-C pulse is detected.
If the sign is positive, travel will be toward the zero point return direction; if
the sign is negative, travel will be away from the zero point return direction.
N-OT
*2
P-OT
*1
Start
Zero Point
Phase-C pulse
Zero Point Return Travel Distance
(OL42)
Creep Rate
(OL40)
Approach Speed
(OL3E)