6.2 Motion Command Details
6.2.4 Interpolation (INTERPOLATE)
6-37
( 2 ) Holding and Aborting
The axis will decelerate to a stop if there is no change in the target position each high-speed scan.
The Holds a Command bit (OW09, bit 0) and the Interrupt a Command bit (OW09, bit 1) cannot be used.
Change a motion command to stop the interpolation execution.
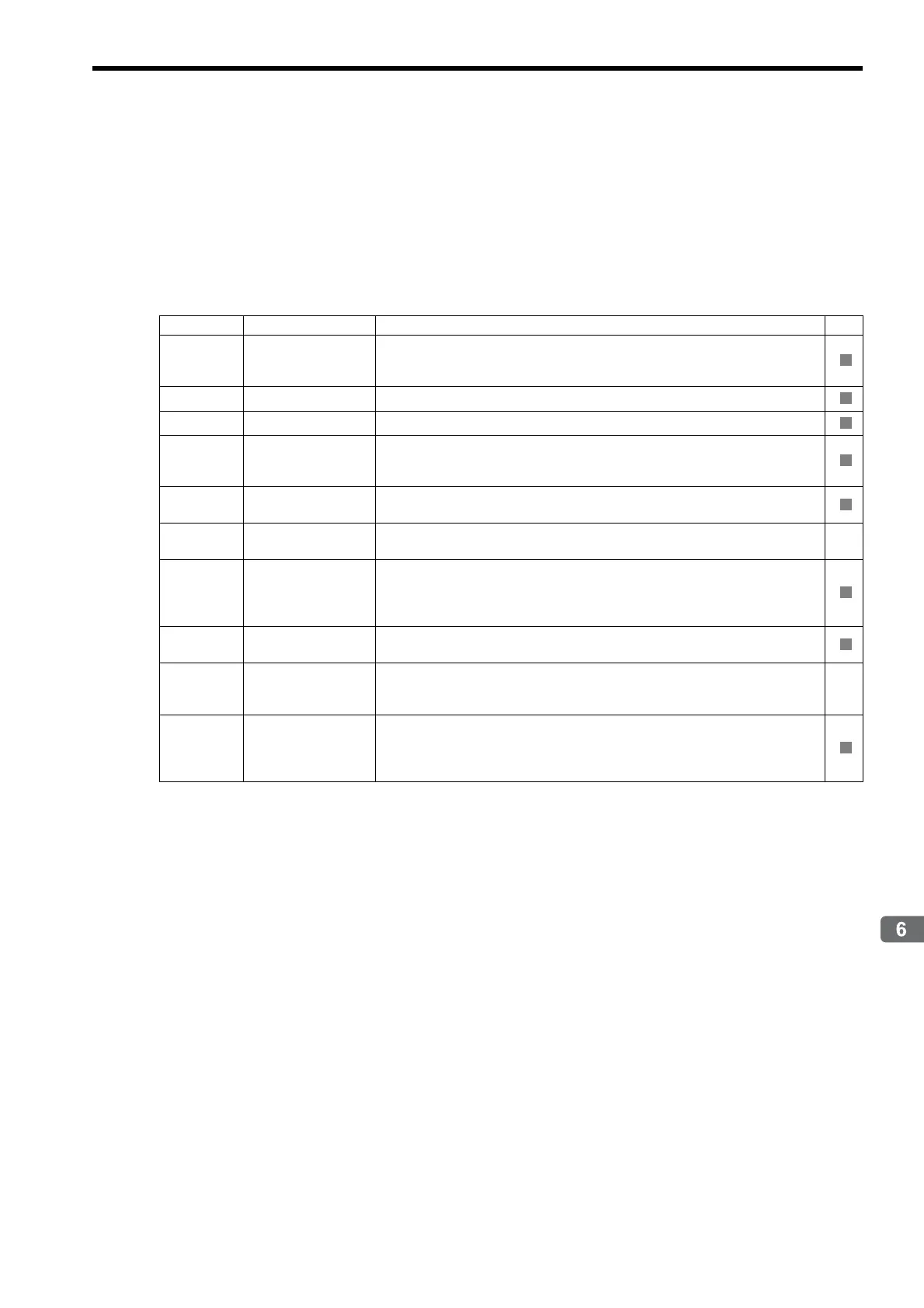
( 3 ) Related Parameters
[ a ] Setting Parameters
Parameter Name Setting SVR
OW00
Bit 0
Servo ON
Turns the power to the Servomotor ON and OFF.
1: Power ON to Servomotor, 0: Power OFF to Servomotor
Turn ON this bit before setting the Motion Command (OW08) to 4.
OW03 Function Setting 1
Sets the speed unit, acceleration/deceleration units, and filter type.
OW08 Motion Command
The positioning starts when this parameter is set to 4.
OW09
Bit 5
Position Reference
Type
Switch the type of position reference.
0: Incremental addition mode, 1: Absolute mode
Set this parameter before setting the Motion Command (OW08) to 4.
OL1C
Position Reference
Setting
Set the target position for positioning. The setting can be updated every high-speed
scan.
OL1E
Width of Positioning
Completion
Set the width in which to turn ON the Positioning Completed bit (IW0C, bit
1).
–
OL20
NEAR Signal Out-
put Width
Set the range in which the NEAR Position bit (IW0C, bit 3) will turn ON.
The NEAR Position bit will turn ON when the absolute value of the difference
between the reference position and the feedback position is less than the value set
here.
OW31
Speed Compensa-
tion
Set the feed forward amount as a percentage of the rated speed.
The setting unit for this parameter is 0.01% (fixed).
OL38
Straight Line Decel-
eration/Decelera-
tion Time Constant
Set the rate of deceleration or deceleration time constant for positioning.
Used for deceleration stops when an alarm has occurred.
–
OW3A Filter Time Constant
Set the acceleration/deceleration filter time constant.
Exponential acceleration/deceleration or a moving average filter can be selected in
the Function Setting 1 (OW03, bits 8 to B). Change the setting only after pulse
distribution has been completed for the command (IW0C, bit 0 is ON).