6.2 Motion Command Details
6.2.22 Speed Reference (VELO)
6-84
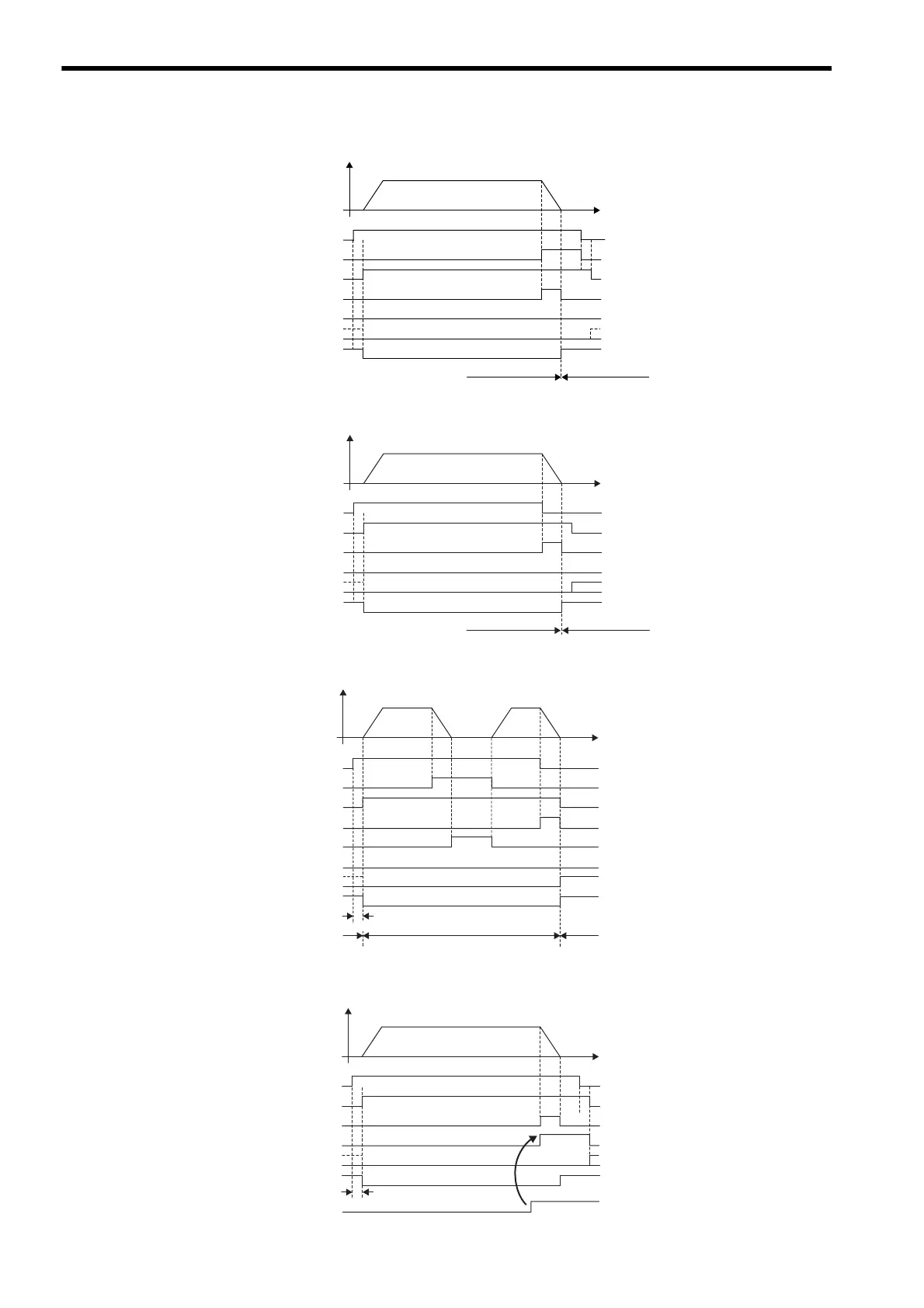
[ b ] Execution when Aborted
[ c ] Execution when Aborting by Changing the Command
[ d ] Command Hold
[ e ] Execution when an Alarm Occurs
OW09 = 1 (ABORT)
Speed Control Mode Position Control Mode
OW08 = 23 (VELO)
IW08 = 23 (VELO)
IW09, bit 0 (BUSY)
IW09, bit 8 (COMPLETE)
IW09, bit 3 (FAIL)
IW0C, bit 0 (DEN)
Speed Control Mode Position Control Mode
OW08 = 23 (VELO)
IW08 = 23 (VELO)
IW09, bit 0 (BUSY)
IW09, bit 8 (COMPLETE)
IW09, bit 3 (FAIL)
IW0C, bit 0 (DEN)
OW08=23 (VELO)
OW09, bit 0 (HOLD)
IW08=23 (VELO)
IW09, bit 1 (HOLDL)
IW09, bit 0 (BUSY)
IW09, bit 3 (FAIL)
IW09, bit 8 (COMPLETE)
IW0C, bit 0 (DEN)
Speed Control Mode Position Control Mode
1scan
Alarm
1 scan
OW08
IW08
IW09, bit 0 (BUSY)
IW09, bit 8 (COMPLETE)
IW09, bit 3 (FAIL)
IW0C, bit 0 (DEN)