6.2 Motion Command Details
6.2.24 Phase References (PHASE)
6-90
4.
Execute another motion command to cancel the phase control mode.
( 2 ) Holding and Aborting
The Holds a Command bit (OW09, bit 0) and the Interrupt a Command bit (OW09, bit 1) cannot be used.
( 3 ) Related Parameters
[ a ] Setting Parameters
[ b ] Monitoring Parameters
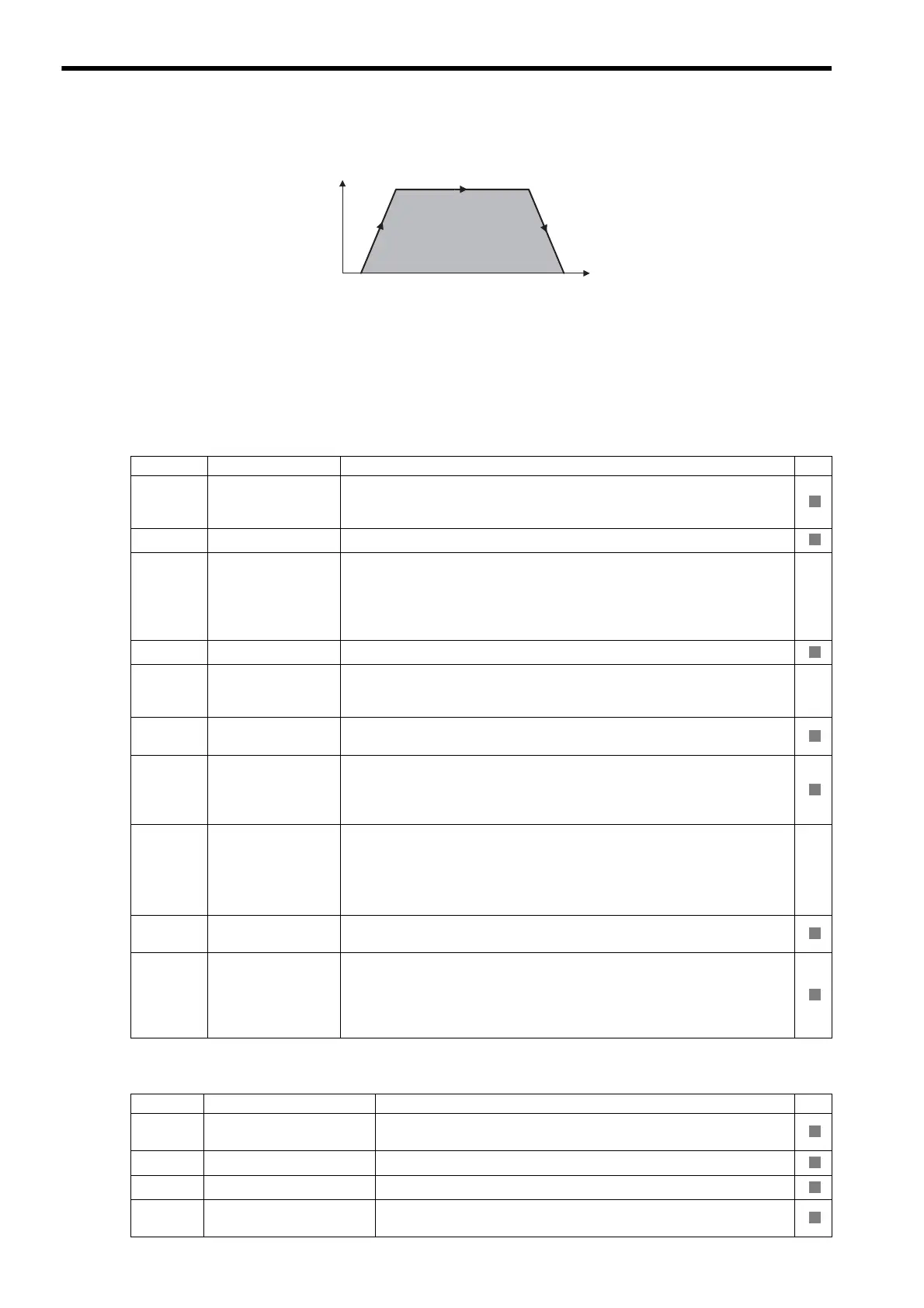
0
Speed (%)
Time (t)
Position
Parameter Name Setting SVR
OW00
Bit 0
Servo ON
Turns the power to the Servomotor ON and OFF.
1: Power ON to Servomotor, 0: Power OFF to Servomotor
Turn ON the power before setting the Motion Command (OW08) to 25.
OW03 Function Setting 1
Sets the speed unit, acceleration/deceleration units, and filter type.
OW05
Bit 1
Phase Reference
Creation Calcula-
tion Disable
Disables/enables phase reference generation processing when executing phase ref-
erence commands. This parameter enables setting processing appropriate to an elec-
tronic shaft or electronic cam.
Enable this processing when an electronic shaft is being used, and dis-
able it when an electronic cam is being used.
−
OW08 Motion Command
Phase control operation is started when this parameter is set to 25.
OW09
Bit 6
Phase
Compensation Type
If using a system with an electronic cam, select a setting method for the phase com-
pensation for the reference value of the cam pattern.
0: Incremental addition mode, 1: Absolute mode
−
OL10
Speed Reference
Setting
Set the speed reference. The setting can be changed during operation.
The unit depends on the Function Setting 1 setting (OW
03, bits 0 to 3).
OL16
Second Speed Com-
pensation
Set the speed feed forward amount for the Phase Reference command (PHASE).
The setting unit for Speed Compensation (setting parameter OW31) is 0.01%
(fixed). The unit for this parameter, however, can be selected by the user. When
used at the same time as OW31, speed compensation can be performed twice.
OL28
Phase
Correction Setting
Set the phase correction amount in reference units.
Set the number of pulses for phase compensation in pulses when an
electronic shaft is being used.
Use the incremental addition mode to calculate the cam pattern target
position when an electronic cam is being used.
−
OW31
Speed Compensa-
tion
Set the speed feed forward gain as a percentage of the rated speed.
The setting units for this parameter is 0.01% (fixed).
OW3A Filter Time Constant
Set the acceleration/deceleration filter time constant. Exponential acceleration/
deceleration or a moving average filter can be selected in the Function Setting 1
(OW03, bits 8 to B).
Change the setting only after pulse distribution has been completed for the com-
mand (IW0C, bit 0 is ON).
Parameter Name Monitor Contents SVR
IW00
Bit 1
Running (At Servo ON)
Indicates the Servo ON status.
1: Power supplied to Servomotor, 0: Power not supplied to Servomotor
IL02 Warning
Stores the most current warning.
IL04 Alarm
Stores the most current alarm.
IW08
Motion Command Re-
sponse Code
Indicates the motion command that is being executed.
The response code will be 25 during PHASE command execution.