12.5 Troubleshooting Motion Errors
12.5.2 Motion Error Details and Corrections
12-36
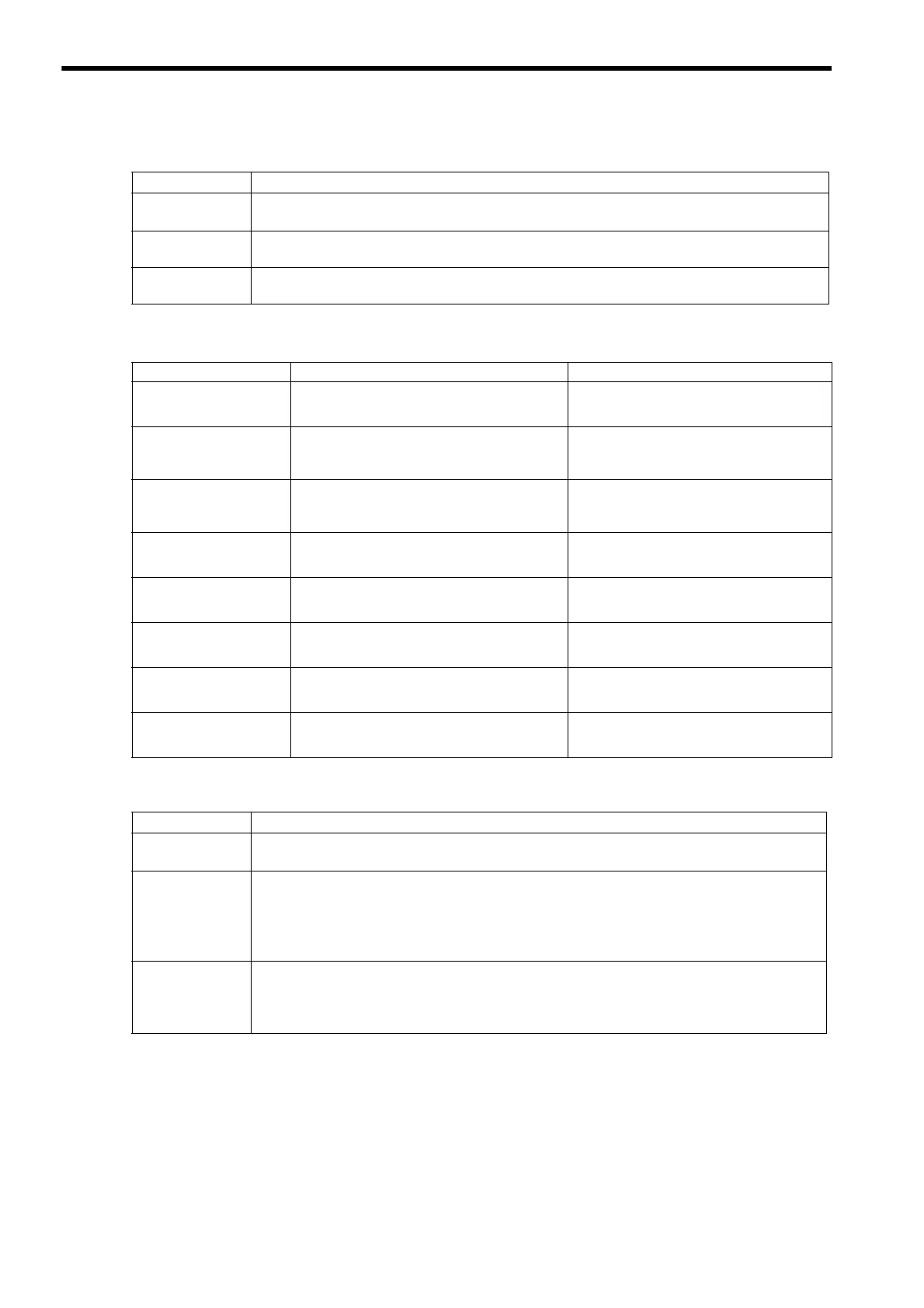
( 8 ) Bit 8: Excessive Speed
The maximum value for speed that can be specified is as follows, depending on the connected SERVOPACK.
In simulation mode, the maximum value for the speed is always 32767000 for all SERVOPACK models.
( 9 ) Bit 9: Excessive Deviation
The above check is not performed if the Error Count Alarm Detection (OL22) is set to 0.
Detection Timing
• A move command is executed.
Processing when
Alarm Occurs
• The move command is not executed.
• The Command Error Completed Status in the Motion Command Status (IW09, bit 3) will turn ON.
Error and Cause
• The speed (movement output for one scan in case of interpolation) commanded to MECHATROLINK
servo exceeds the upper limit.
Correction
• Check the settings for speed reference, interpolation command movement per scan, and speed compensa-
tion.
Model Details Maximum Value for Speed (Pulse/s)
SGD-N
SGDB-AN
MECHATROLINK-I-compatible
AC SERVOPACK
16384000
SGDH-E
JUSP-NS100
SGDH SERVOPACK
NS100 MECHATROLINK-I
Application Module
131068000
SGDH-E
JUSP-NS115
SGDH SERVOPACK
NS115 MECHATROLINK-II
Application Module
32767000
SGDS-1
SGDS SERVOPACK 1048576000
SGDX-12
SGDX SERVOPACK 1048576000
SGDV-1
SGDV SERVOPACK 2097152000
SGD7S-10
SGD7S SERVOPACK 2097152000
SJDE-AN
SJDE SERVOPACK 1048576000
Detection Timing
• Always, except during speed control and torque control
Processing when
Alarm Occurs
• The move command is not executed.
• The Command Error Completed Status in the Motion Command Status (IW09, bit 3) will turn ON.
Error and Cause
One of the following is possible.
• The position loop gain and speed loop gain are not set correctly, creating poor response.
• The Error Count Alarm Detection (OL22) is too small.
• The capacity of the motor is insufficient for the machine load.
• SERVOPACK failure
Correction
Check the following and correct the problem. If the problem persists, contact the maintenance department.
• Check the position loop gain and speed loop gain.
• Check the Error Count Alarm Detection (OL22).
• Check the motor capacity.