4.3 Motion Parameter Lists
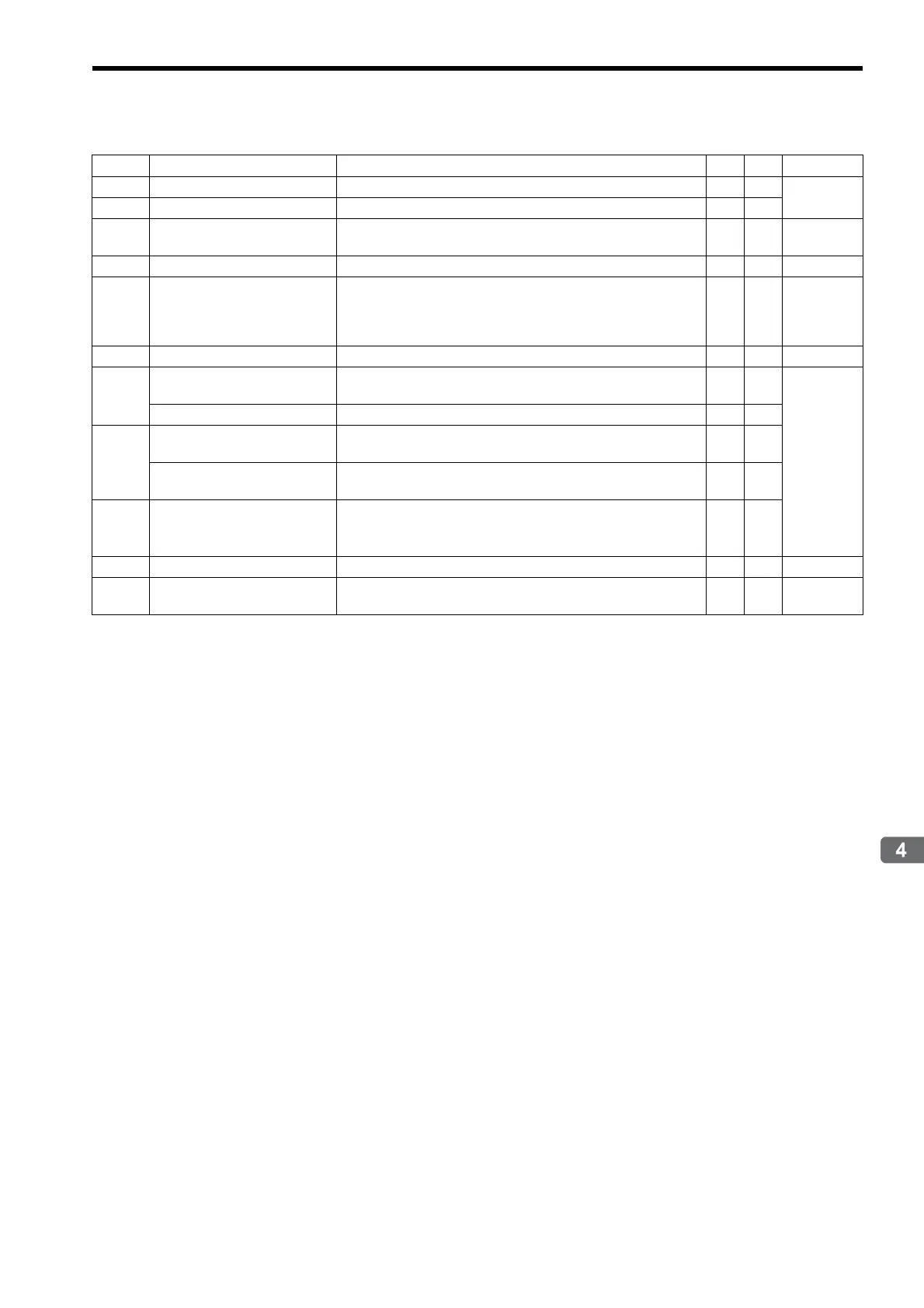
4.3.1 Fixed Parameter List
4-7
12
Positive Software Limit Value
1 = 1 user unit
Yes −
4.4.1 ( 6 )
14
Negative Software Limit Value
1 = 1 user unit
Yes −
16
Backlash Compensation
Amount
1 = 1 user unit
Yes − 4.4.1 ( 7 )
18 to 29
−
Reserved for system use.
−− −
30
Encoder Selection
0: Incremental encoder
1: Absolute encoder
2: Absolute encoder (Incremental encoder is used.)
3: Reserved (External encoder)
Yes − 4.4.1 ( 8 )
31 to 33
−
Reserved for system use.
−− −
34
Rated Motor Speed (Rotary
Motor)
1 = 1 min
-1
Yes Yes
4.4.1 ( 9 )
Rated Speed (Linear Motor)
1 = 0.1 m/s, 0.1 mm/s
Yes Yes
36
Number of Pulses per Motor
Rotation (Rotary Motor)
1 = 1 pulse/rev
Set the value after multiplication.
Yes Yes
Number of Pulses per Linear
Scale Pitch (Linear Motor)
1 = 1 pulse/scale pitch
Yes Yes
38
Maximum Number of Abso-
lute Encoder Turns Rotation
1 = 1 rev
Set to 0 when a direct drive motor is being used.
Invalid for linear type
Yes −
40 to 41
−
Reserved for system use.
−− −
42
Feedback Speed Movement
Averaging Time Constant
1 = 1 ms
Yes Yes 4.4.1 ( 9 )
(cont’d)
No. Name Contents SVB SVR Reference