8 Operation
8.4.2 Overtravel
8-10
(3) Servomotor Stopping Method When Overtravel Occurs
There are three servomotor stopping methods when overtravel occurs.
•Dynamic brake
By short-circuiting the electric circuits, the servomotor comes to a quick stop.
For the spindle motor, it coasts to a stop.
•Decelerate to a stop
Stops by using emergency stop torque.
•Coast to a stop
Stops naturally, with no control, by using the friction resistance of the motor in operation.
After servomotor stopping, there are two modes.
•Coast mode
Stopped naturally, with no control, by using the friction resistance of the motor in operation.
•Zero clamp mode
A mode forms a position loop by using the position reference zero.
The servomotor stopping method can be set in parameter Pn001. The factory setting of Pn001 differs
depending on the model. For details, refer to 12.1 SERVOPACK Parameters.
•A servomotor under torque control cannot be decelerated to a stop. The servomotor is stopped with the
dynamic braking (DB) or coasts to a stop according to the setting of Pn001.0. After the servomotor stops,
the servomotor will enter a coast state.
•For details on servomotor stopping methods after the SV_OFF command is received or an alarm occurs,
refer to 8.4.4 Stopping Servomotor after SV_OFF Command or Alarm Occurrence.
Note: A coasting to a stop is always performed regardless of the set values of Pn001 if a spindle motor is used.
When Servomotor Stopping Method is Set to Decelerate to Stop
Emergency stop torque can be set with Pn406.
∗ If a spindle motor is used, a stop will be performed using the torque values that are set for Pn430 and Pn431.
•The setting unit is a percentage of the rated torque.
•The factory setting is 800% so that the setting is large enough a value to operate the servomotor at maximum
torque. The maximum value of emergency stop torque that is actually available, however, is limited to the
maximum torque of the servomotor.
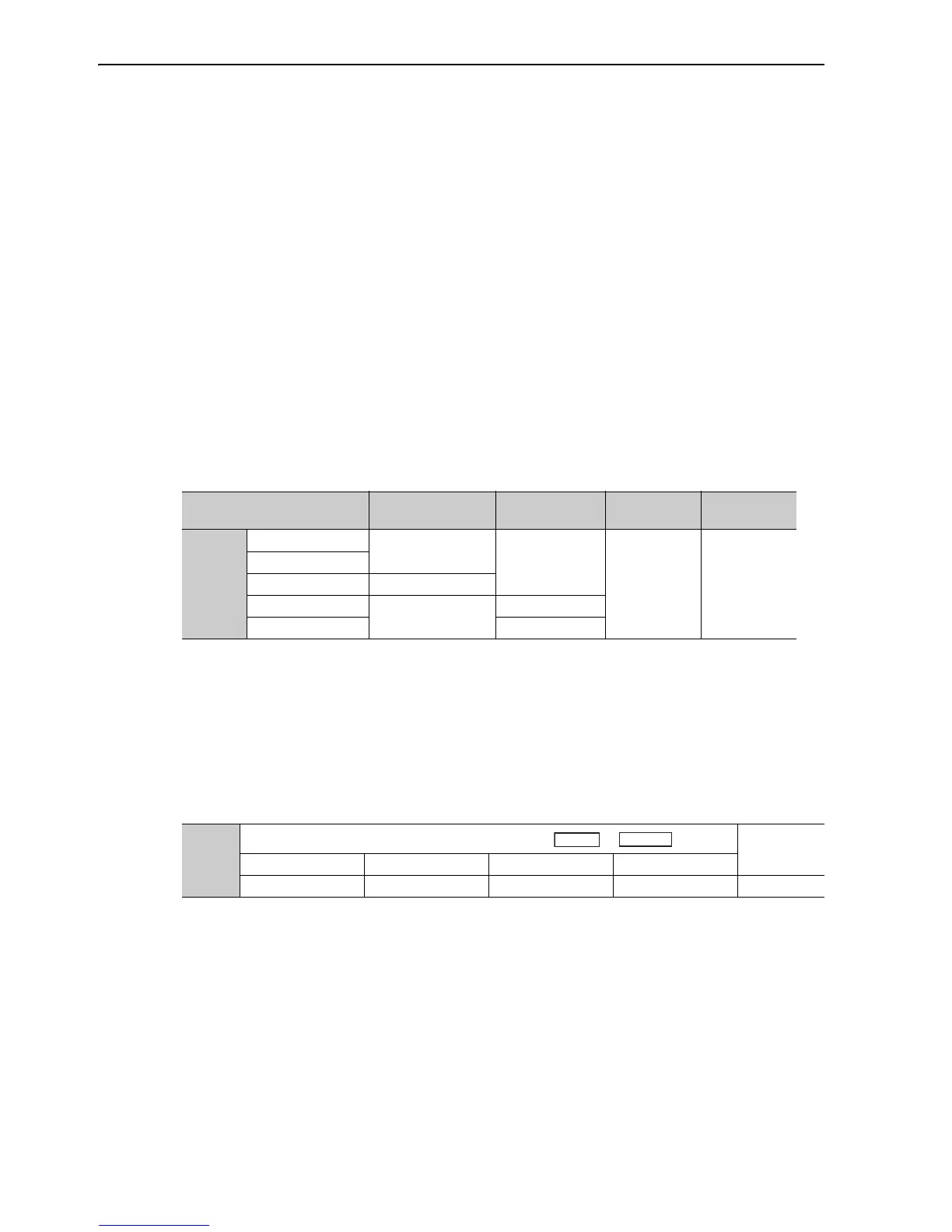
Parameter
(Index Number)
Stop Method
Mode After
Stopping
When Enabled Classification
Pn001
(2001h)
n.00
DB
Coast
After restart Setup
n.01
n.02 Coast
n.1
Deceleration to a stop
Zero clamp
n.2 Coast
Pn406*
(20A2h)
Emergency Stop Torque
ޓ
Classification
Setting Range Setting Unit Factory Setting When Enabled
0 to 800 1% 800 Immediately Setup
 Loading...
Loading...








