12 Appendix
12-10
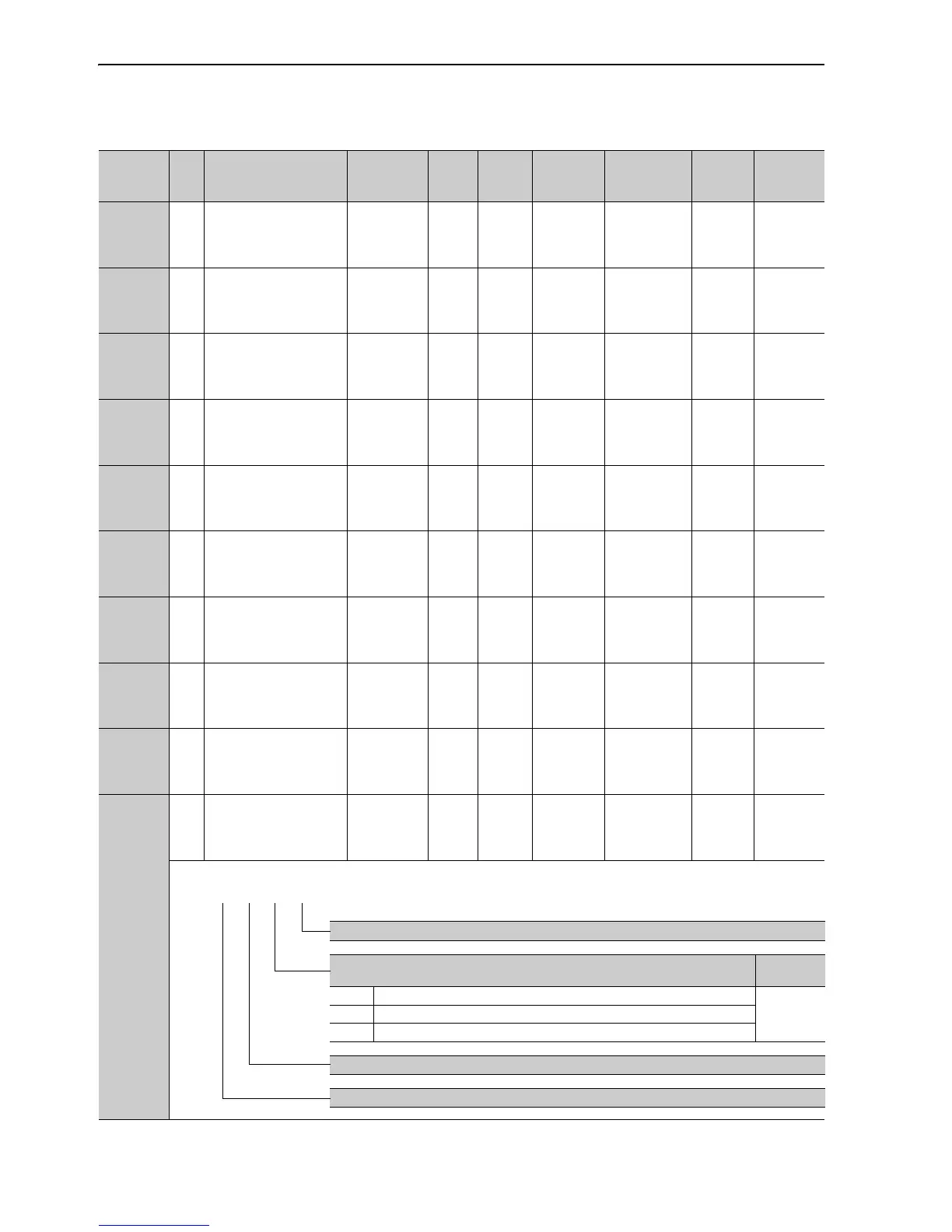
Pn100
(2040h:1)
2Speed Loop Gain 10 to 200000.1 Hz 400
Immedi-
ately
Tuning
spindle
motor,
servo-
motor
–
Pn101
(2040h:2)
2
Speed Loop Integral
Time Constant
15 to 51200
0.01
ms
2000
Immedi-
ately
Tuning
spindle
motor,
servo-
motor
–
Pn102
(2040h:3)
2 Position Loop Gain 10 to 20000 0.1/s 400
Immedi-
ately
Tuning
spindle
motor,
servo-
motor
–
Pn103
(2060h)
2Moment of Inertia Ratio 0 to 20000 1% 100
Immedi-
ately
Tuning
spindle
motor,
servo-
motor
–
Pn104
(2041h:1)
22nd Speed Loop Gain 10 to 20000 0.1 Hz 400
Immedi-
ately
Tuning
spindle
motor,
servo-
motor
–
Pn105
(2041h:2)
2
2nd Speed Loop Integral
Time Constant
15 to 51200
0.01
ms
2000
Immedi-
ately
Tuning
spindle
motor,
servo-
motor
–
Pn106
(2041h:3)
22nd Position Loop Gain 10 to 20000 0.1/s 400
Immedi-
ately
Tuning
spindle
motor,
servo-
motor
–
Pn109
(2061h)
2 Feedforward Gain 0 to 100 1% 0
Immedi-
ately
Tuning
spindle
motor,
servo-
motor
–
Pn10A
(2062h)
2
Feedforward Filter Time
Constant
0 to 6400
0.01
ms
0
Immedi-
ately
Tuning
spindle
motor,
servo-
motor
–
Pn10B
(2065h)
2
Application Function for
Gain Select Switch
0000 to 5334 − 0000 − Setup
spindle
motor,
servo-
motor
−
(cont’d)
Parameter
No.
(Index No.)
Size Name
Setting
Range
Units
Factory
Setting
When
Enabled
Classification
Motor
Type
Reference
Section
Reserved (Do not change.)
Speed Loop Control Method
When
Enabled
0 PI control
After restart1 I-P control
2 to 3 Reserved (Do not change.)
Reserved (Do not change.)
Reserved (Do not change.)
4th 3rd 2nd 1st
digit digit digit digit
n.
 Loading...
Loading...








