Metal clamp, tilthouseM
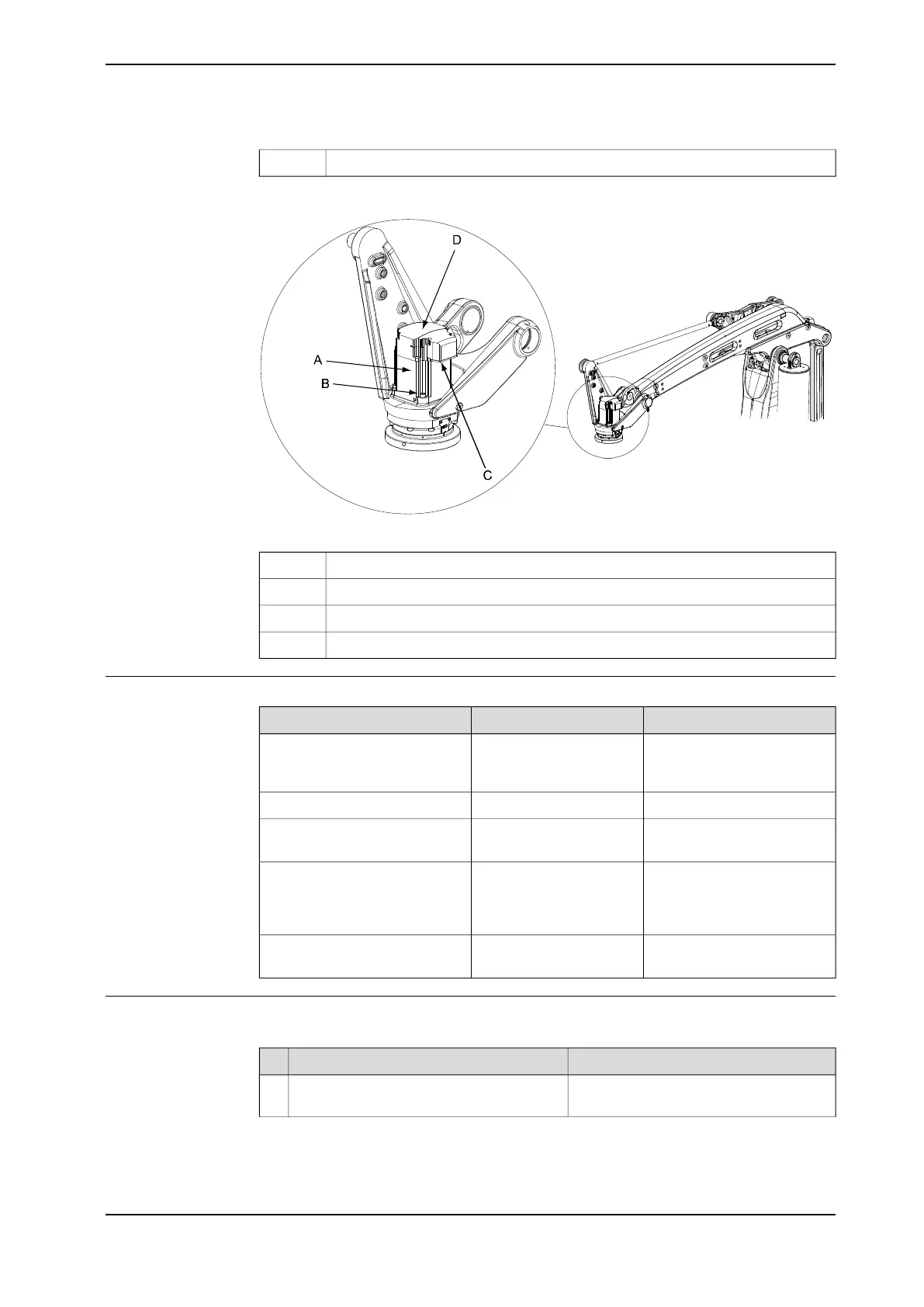
The motor axis 6 is located as shown in the figure below.
xx0600002600
Motor, axis 6A
Attachment screws and washersB
Cable gland coverC
Motor coverD
Required equipment
NoteArt.no.Equipment, etc
For spare part no. see:
• Spare part lists on
page 353
Cable harness, 1-6
Motor, axis 6-Gasket
Content is defined in section
Standard tools on page 347.
-Standard toolkit
These procedures include
references to the tools re-
quired.
Other tools and procedures may
be required. See references to
these procedures in the step-by-
step instructions below.
See chapter Circuit dia-
grams on page 355.
Circuit diagram
Removing cable harness, upper end (incl. axis 6)
Use this procedure to remove the cable harness, upper arm (incl. axis 6).
NoteAction
This is done in order to facilitate updating
of the revolution counter.
Move the robot to the calibration position.1
Continues on next page
Product manual - IRB 660 159
3HAC025755-001 Revision: W
© Copyright 2006-2020 ABB. All rights reserved.
4 Repair
4.3.2 Replacing the cable harness, upper end (incl. axis 6)
Continued