26
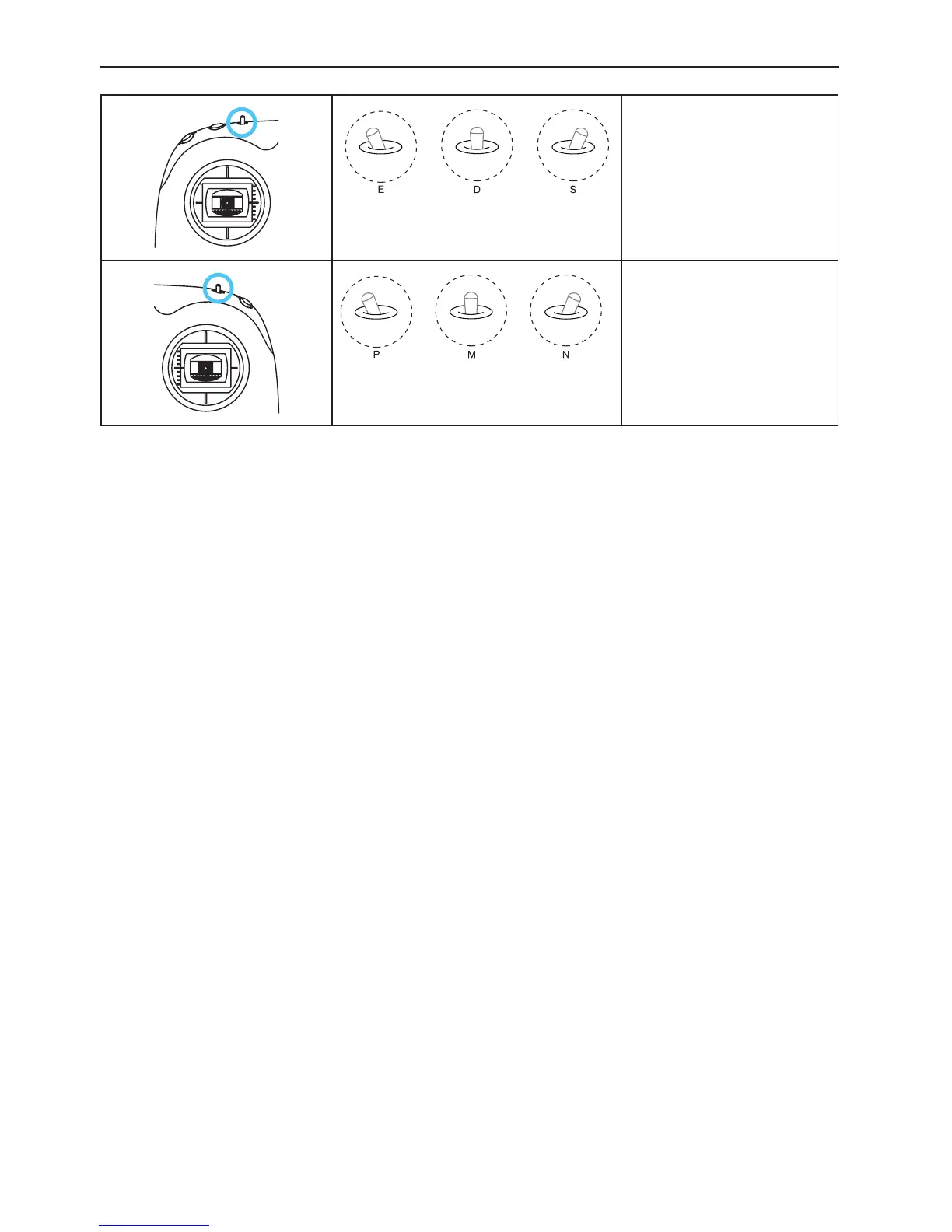
Position -1 (left) Position -2 (middle)
Position -3 (righ
t)
Threeightspeedpositions:
PositionS:highspeed
PositionD:mediumspeed
PositionE:lowspeed
Werecommendposition
E(lowspeed)tobeginner
players.
Position -1 (left) Position -2 (middle)
Position -3 (right)
Threeightmodepositions:
PositionP:intelligentposition
mode(autoswitchbetween
theGPSmodeandvisual
positioningmode)
PositionM:normalmode
PositionN:neutralmode
※ InpositionP(GPS/Visual),theUAVwillgetintospothoverifbothjoysticksareintheneutralposition.
※ WhenusePmodeoutdoor,itisrecommendedtotakeoaftertheGPSndsatellitessuccessfully(the
reararmLEDremainsgreen).
※ InPositionM,theUAVwillkeepitsbodyhorizontalandmaydrifthorizontallyifbothjoysticksareinthe
neutralposition.
※ Incaseofbig“joystickinneutral”error,themotorcannotbestarteduponjoystickpushing.Recalibrate
thejoysticks.
Application of Visual Positioning System (Only for Condor Elite)
Thevisualpositioningsystemisapplicabletotheightsincaseof<2.5maltitudeandnoorweakGPSsignal,
especiallyindoorights.
1. Flightspeed>4m/s;
2. High-speedightat<0.5maltitude(positioningfailure);
3. Dramaticandrapidilluminationchanges;
4. Abovemovingobjects(movingcrowds,shruborgrassswayinginstrongwind,etc.);
5. Abovepure-color(black,red,white,etc.)surfaces,transparentsurfacesorwater;
6. Abovesparse-texturesurfacesorsurfaceswithhighlyrepeatedtexture;
7. Aboveinclination>30°surfaces;
8. Abovesurfaceswithstrongreection;
9. Abovesurfaceswithhighultrasonicwaveabsorptionperformance.
※ Precautions:
• Makesurethecameralensofthevisualpositioningsystemissharpandstainless.
• Makesurethesurroundingshavesucientlightsourcesandrichearthsurfacetexture,asthevisual
positioningsystemreliesontheearthsurfaceimagetoacquirethedisplacementdata.
• Abovethewaterorinanenvironmentwithdimlightoruncleargroundtexture,thevisualpositioning
systemmayfailtolocate.
• Tousethevisualpositioningsystem,donotstartotherultrasonicequipments(includingotherUAVs)near
theUAV.