Q-8
MD5 Series
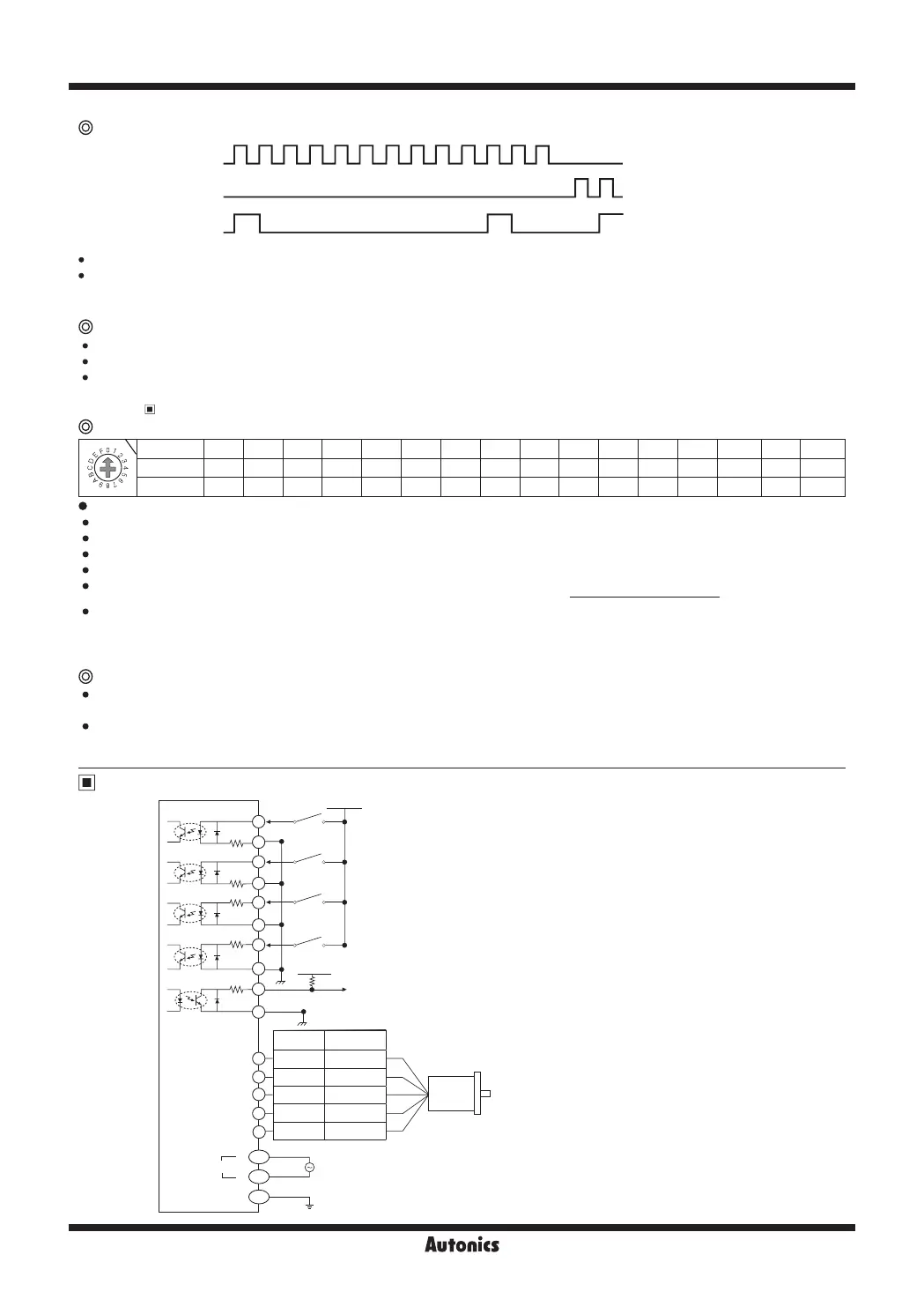
I/O Circuit and Connections
Zero point excitation output signal (ZERO OUT)
CW Pulse
CCW Pulse
ZERO OUT
ON
OFF
ON
OFF
ON
OFF
0 0 01 1 12 23 4 5 6 7 8 9
Switch No. 0 1 2 3 4 5 6 7 8 9 A B C D E F
Resolution 1 2 4 5 8 10 16 20 25 40 50 80 100 125 200 250
Step angle 0.72° 0.36° 0.18° 0.144° 0.09° 0.072° 0.045° 0.036°
0.0288°
0.018°
0.0144°
0.009°
0.0072° 0.00576° 0.0036° 0.00288°
This output indicates the initial step of excitation order of stepper motor and rotation position of motor axis .
This signal outputs every 7.2° of rotation of the motor axis regardless of resolution.
(50 outputs per 1 rotation of the motor.)
E.g.) Full step: outputs one time by 10 pulses input, 20-division: outputs one time by 200 pulses input.
This signal is for rotating motor's axis using external force or used for manual positioning.
When hold off signal maintains over 1ms as [H], motor excitation is released.
When hold off signal maintains over 1ms as [L], motor excitation is in a normal status.
※
Must stop the motor for using this function.
※
Refer to I/O Circuit and Connections.
HOLD OFF function
Setting Microstep (microstep: resolution)
Alarm output function
Setting Resolution (same as MS1, MS2)
The MS1, MS2 switches is for resolution setting.
Select MS2 or MS2 by DIVISION SELECTION signal ([L]: MS1, [H]: MS2)
Select the step angle (motor rotation angle per 1 pulse).
The set step angle is dividing basic step angle (0.72°) of 5-phase stepper motor by setting value.
The calculation formula of divided step angle is as follow.
When using geared type motor, the angle is step angle divided by gear ratio.
Step angle / gear ratio = Step angle applied gear
E.g) 0.72° / 10 (1:10) = 0.072°
※
Must stop the motor before changing the resolution.
Set step angle =
Basic step angle (0.72°)
Resolution
Overheat: When the temperature of driver base is over 80
℃
, alarm indicator (red) turns ON and motor stops with holding
the excision. Turn OFF the power and remove the causes. Turn ON the power and alarm output is OFF.
Overcurrent: When overcurrent is applied from motor damage by burn, driver damage, or error, alarm LED (red) is
flashed. When overcurrent occurs, the motor becomes HOLD OFF. Turn OFF the power and remove the causes to
normal operation.
※
CW
2-pulse input method (CW rotation signal input)
1-pulse input method (operating rotation signal input)
※
CCW
2-pulse input method (CCW rotation signal input)
1-pulse input method (rotation direction signal input)
→ [H]: CW, [L]: CCW
※
HOLD OFF
Control signal for motor excitation OFF
→ [H]: Motor excitation OFF
※
DIVISION SELECTION
Division selection signal
→ [L]: Operated by switch MS1
[H]: Operated by switch MS2
※
ZERO OUT
Zero point excitation output signal → Zero point status ON
※
If the power for driving pulse from external is over
than +5VDC, please connect resistor at the outside.
(input power max. 24VDC, input current 10-20mA)
[Signal]
[Motor]
[Power]
※
This connection cable color is only for Autonics motors.
It may different cable color when using other motors.
Power
BLUE
RED
ORANGE
GREEN
BLACK
L
N
100-220VAC
50/60Hz
GND
G
AC
AC
5
4
3
2
1
1
2
3
4
5
6
7
8
9
10
270Ω
270Ω
390Ω
390Ω
10Ω
CW
CCW
HOLD
OFF
+5VDC
+5VDC
ZERO OUT
DIVISION SELECTION
2kΩ
Motor
Pentagon
connection
Standard
connection
Blue Gray+Red
Red Yellow+Black
Orange
Orange+White
Green Brown+Green
Black Blue+Purple

 Loading...
Loading...





