www.baldormotion.com
Mint Keyword Summary C-9MN1901
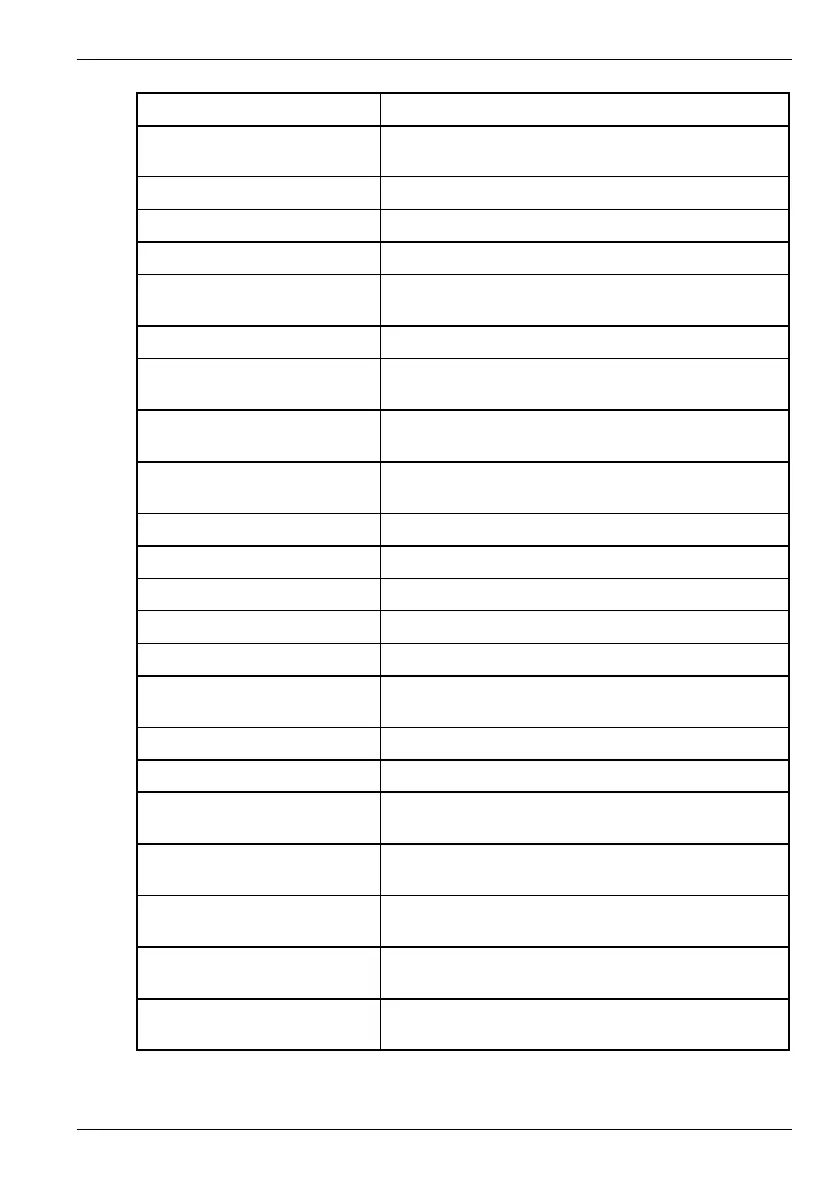
Keyword Description
FEEDRATEMODE To control the use of slew speed, acceleration,
deceleration and feedrate override.
FEEDRATEOVERRIDE Overrides the current speed or feedrate being used.
FIRMWARERELEASE To read the release number of the firmware.
FIRMWAREVERSION To read the version number of the firmware.
FLY To create a flying shear by following a master axis with
controlled acceleration and deceleration.
FOLERROR To return the instantaneous following error value.
FOLERRORFATAL To set the maximum permissible following error before
an error is generated.
FOLERRORMODE To determine the action taken on the axis in the event of
a following error.
FOLERRORWARNING Sets the following error threshold before an axis warning
is generated.
FOLLOW To enable encoder following with a specified gear ratio.
FOLLOWMODE To define the mode of operation of the FOLLOW keyword.
FOLLOWNUMERATOR To set or read the follow ratio’s numerator.
GEARING To set the percentage size for gearing compensation.
GEARINGMODE To turn gearing compensation on or off.
GLOBALERROROUTPUT Allows the user to specify a global error output which will
be deactivated in the event of an error.
GO To begin synchronized motion.
GROUP To set or read whether a node is a member of a group.
GROUPCOMMS To write to the comms arrays of all the nodes within a
specified group.
GROUPMASTER To set a node as the master of a group or to return the
node ID of the group master.
GROUPMASTERSTATUS To determine whether the current node is master of the
group.
GROUPSTATUS To determine whether the current node is a member of
the group.
HALL To read the current Hall state on feedback devices
which use Hall sensors.
Artisan Technology Group - Quality Instrumentation ... Guaranteed | (888) 88-SOURCE | www.artisantg.com
 Loading...
Loading...
