B-2 Parameter Tables MN762
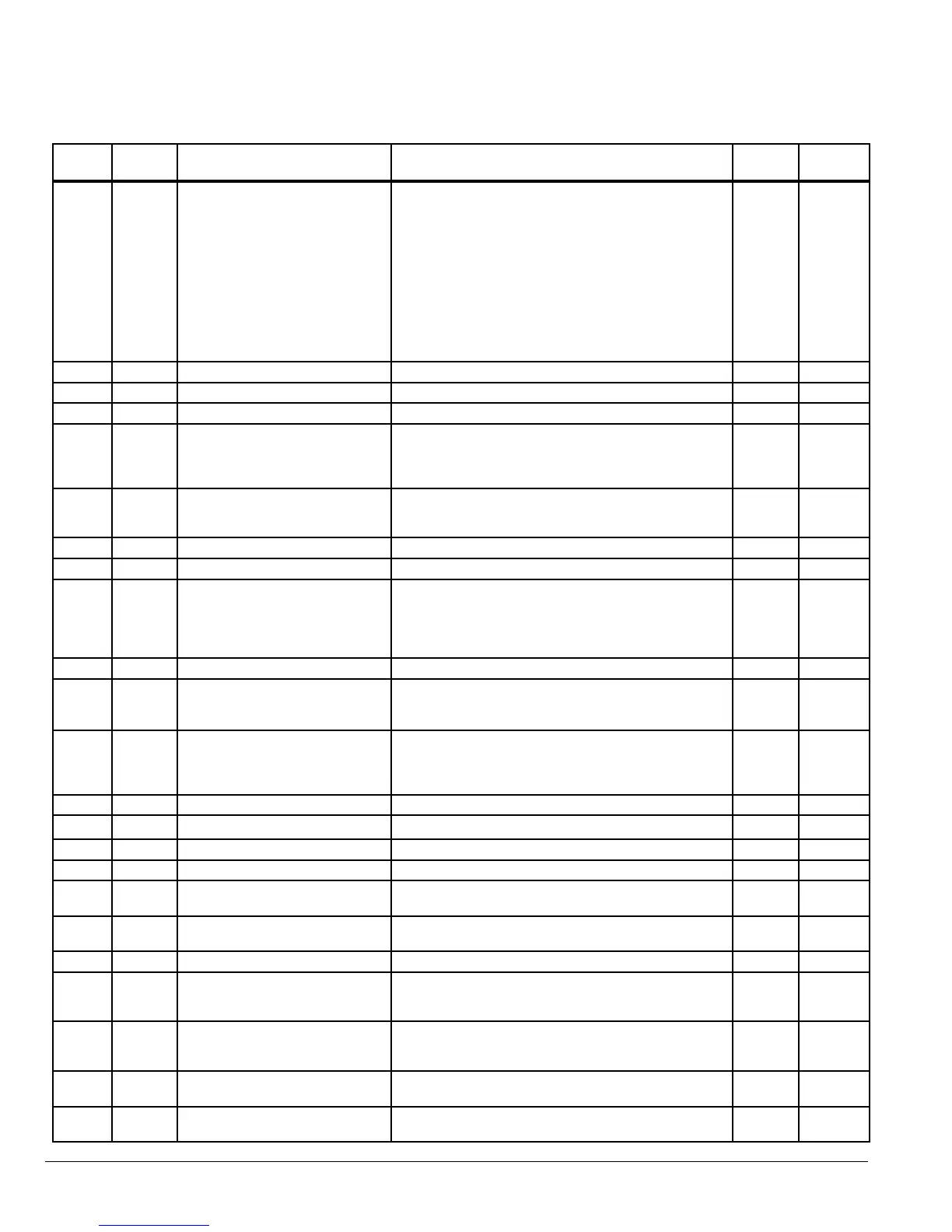
Param
#
Access Parameter Name Description (Range)
Factory
Setting
User
Setting
P24 RW Analog/Digital Output
Digital output mode
0: Drive enabled
1: Drive healthy
2: Motor at target speed
3: Drive tripped
4: Motor speed >= limit
5: Motor current >= limit
6: Motor speed < limit
7: Motor current < limit
Analog output mode
8: Motor speed
9: Motor current
8
P25 RW Relay output limit 0.0 to 100.0% For Speed; 0 to 200% for Current 100.0
P26 RW Skip Frequency P-05 to P-06 0.0
P27 RW Skip Frequency Band 0 to P-06 0.0
P28 RW Restart Mode
0: Minimum Speed
1: Previous speed
2: Minimum speed (Auto-run)
3: Previous speed (Auto-run)
1
P29 RW Auto Restart Attempts
Edge-r
Auto-0
Auto-1-5
Auto-0
P30 RW Analog Input Offset -500.0 to 500.0% 0.0
P31 RW Brake After Stop 0 to 60.0 seconds 0.0
P32 RW Brake Before Start
0 - The drive accelerates to speed without delay.
1 - Applies DC braking when run command is
issued. The amount of time is set in P31 and
the amount of braking in P18. (The drive will
then accelerate.)
0
P33 RW Decel2 Fast Stop 0 to 25 seconds 0.00
P34 RW Brake Chopper Enable
0: Disabled
1: Enabled
2: Enabled without s/w protection
0
P35 RW
Serial Comms address Modbus
enable / baudrate select
Trip enable / delay
Addr: 0 (disable) to 63
OP-buS, 9.6, 19.2, 38.4, 57.6, 115.2 kBPS
0 (no trip), t 30, 100, 1000, 3000
(ms) r 30, 100, 1000, 3000 (ms)
Adr 1
OP-BuS
t3000
P36 RW V/F Frequency Adjustment 0 to P-03 0.0
P37 RW V/F Voltage Adjustment 0 - P-01 0
P38 RW User PI Proportional Gain 0.1 - 30.0 1.0
P39 RW User PI Integral time constant 0.0s - 30.0seconds 1.0
P40 RW User PI feedback mode
0: Direct
1: Inverse
0
P41 RW User PI reference select
0: Digital
1: Analog
0
P42 RW User PI digital reference 0 - 100.0% 0.0
P43 RW User PI feedback select
0: 2nd analog input
1: 1st analog input
2: motor load current
0
P44 RW
2nd analog input format
(Analog In 2)
0-10V, 0-20mA,
t 4-20mA, r 4-20mA,
t 20-4mA r 20-4mA
u0-10
P45 RW Parameter access lock
0: Parameters can be changed
1: Read-only
0
P46 RW
Thermal Overload Value
Retention
0: Disabled
1: Enabled
0
Table B-1 Parameters Sorted by Parameter Number (Cont.)