1.18 Use Cases 153
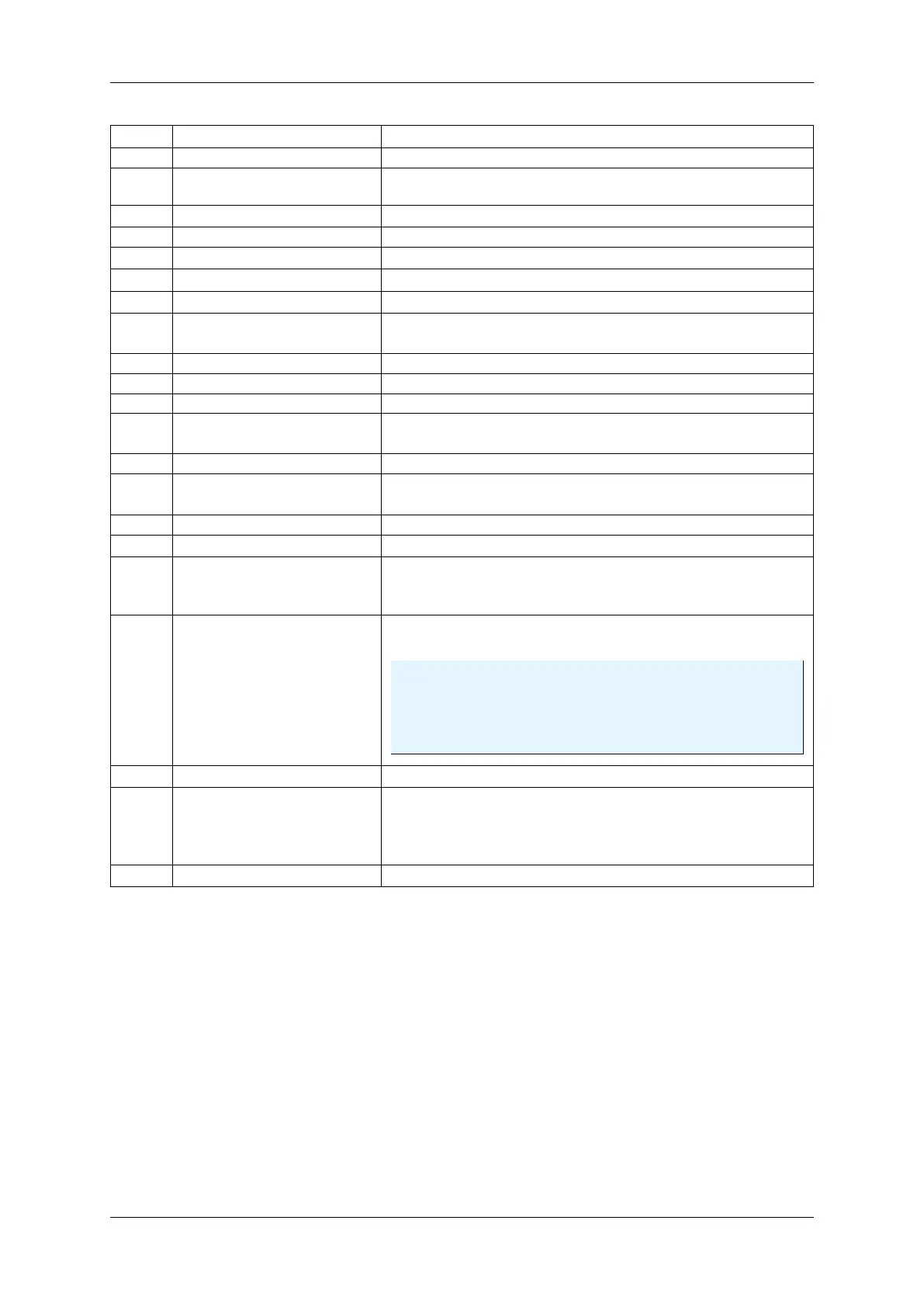
Bit Description Values
0 Reserved N/A
1 Motor direction 0 = Reverse
1 = Forward
2 Running 1 = Motor is running
3 Motor interlock 1 = Motor is disconnected
4 Numbered burst mode 1 = Fixed number of bursts in progress
5 Timed run 1 = Timed free run in progress
6 Multiplexed axis 1 = Multiplexed axis (e.g., SQ-2306, 2206)
7 Controller status 1 = Under computer control (analog servo control, if supported, is
not available)
8 Reserved
9 Forward limit 1 = Forward travel limit reached
10 Reverse limit 1 = Reverse travel limit reached
11 Motor burst or amplitude mode 1 = Amplitude mode (always used in closed-loop mode.
1 = Burst mode (200 Hz)
12 - 15 Reserved N/A
16 Encoder count error 1 = An error was detected in the encoder quadrature signal. Cleared
by sending command <07>.
17 Zero reference enabled 1 = Encoder zero reference mark detection is enabled
18 Motor on target 1 = Encoder position error is zero
19 Motor moving toward target 1 = Motor is moving toward a target position; appears after com-
mand <08> or move step command <06>. Once the target is
reached, bit 19 is set to zero.
20 Maintenance mode enabled 1 = Controller will actively hold the last target position
Note
If bits 20 and 21 are set 1 and bit 18 is set to 0, the
controller is in the process of moving back toward the
last targeted position.
21 Closed loop enabled 1 = Motion commands use the encoder for feedback
22 Motor accelerating 1 = The motor is accelerating to the desired velocity (set at the start
of closed-loop motion)
0 = Required motor speed is reached, motor is decelerating, or mo-
tor is stopped
23 Stalled 1 = The position error exceeds the stall detection threshold
Following two examples will show, how the motor status value will look like (using the code snippet before):
1.18.6.2.3.1 Example 1: Motor doesn't move (return = false)
Status:
Hex: 340080
Dec: 3408000
Binary: 0011 0100 0000 0000 1000 0000
23-20 19-16 15-12 11-08 07-04 03-00 => bit 2 is 0
motorRunning would be 4 = 0000 0000 0000 0000 0000 0100
(status & motorRunning) = 0 => return false
MATRIX VISION GmbH
 Loading...
Loading...