Acceleration pre-control
Function description16
Version: 1.5
Procedure
First of all, optimise the axis with the linear
interpolation. To do this, record the current, velocity
command value, actual velocity and lag error with the
oscilloscope.
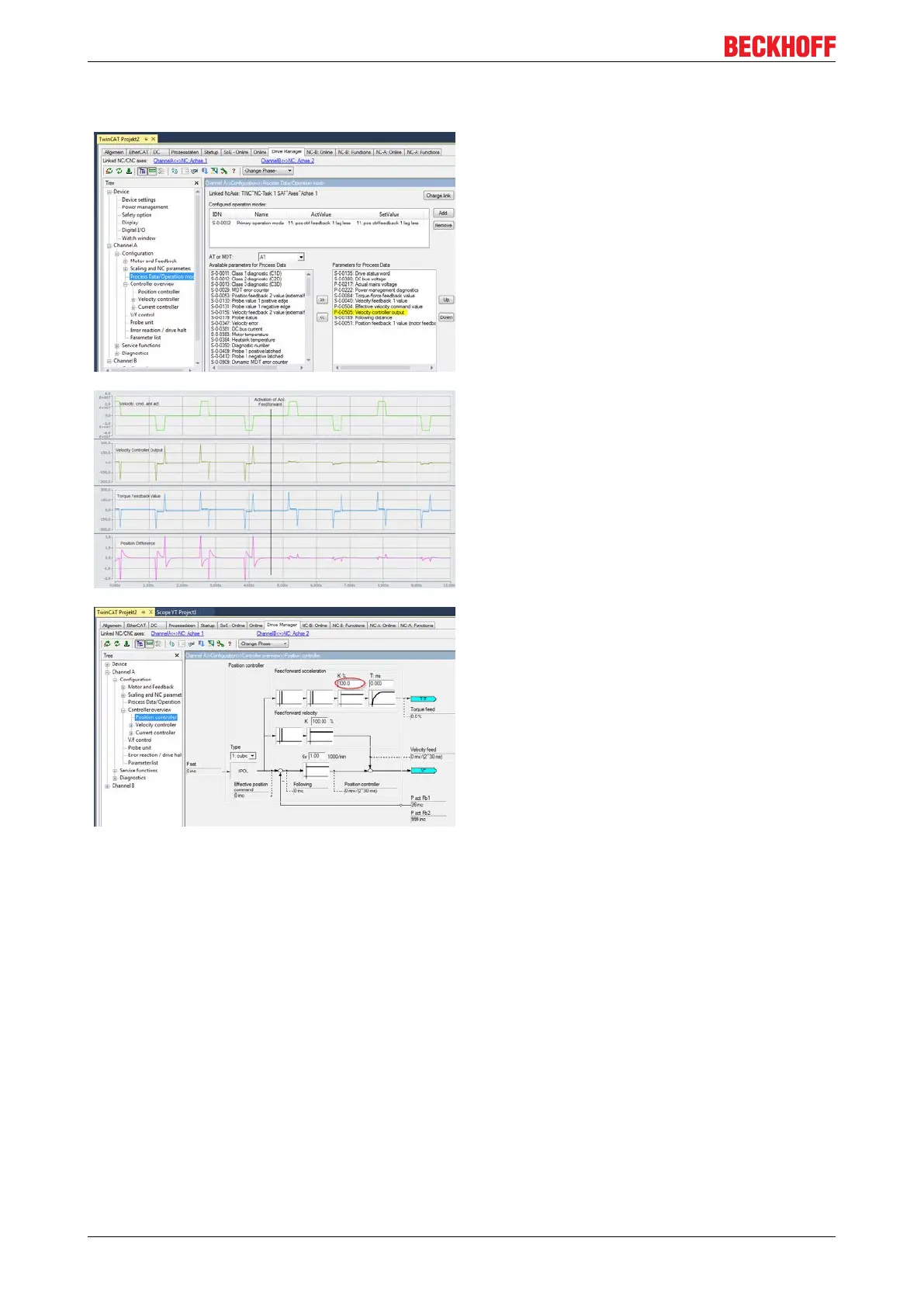
Then activate the cubic interpolation as shown above
and add the parameter P-0-0505 to the process data:
If you record the value of the "velocity controller
output" with the oscilloscope, you will obtain a picture
similar to the one shown here:
The value of the "velocity controller
output" (P-0-0505) is largest during the acceleration
and braking phases.
In the second part of the picture the acceleration pre-
control is active. As a result, the velocity controller is
relieved and the value of the "velocity controller
output" reduced.
At the same time the lag error becomes smaller.
If the moment of inertia is set correctly, a value of
100% is usually ideal for acceleration pre-control
(S-0-0038, “acceleration feedforward gain“):
This can be checked and corrected if necessary
using the oscilloscope recording.
The criterion for this is the size of the lag error and
possibly the value of the "velocity controller output".

 Loading...
Loading...



