Torque (Force) – Controller Structure
Function description 77
Version: 1.5
18 Torque (Force) – Controller Structure
Note
Terminology
Based on this documentation, the term that is usually used for the functional description of
the torque and
force controller structure is torque controller structure. Force controller structure is used for
linear motors.
Note
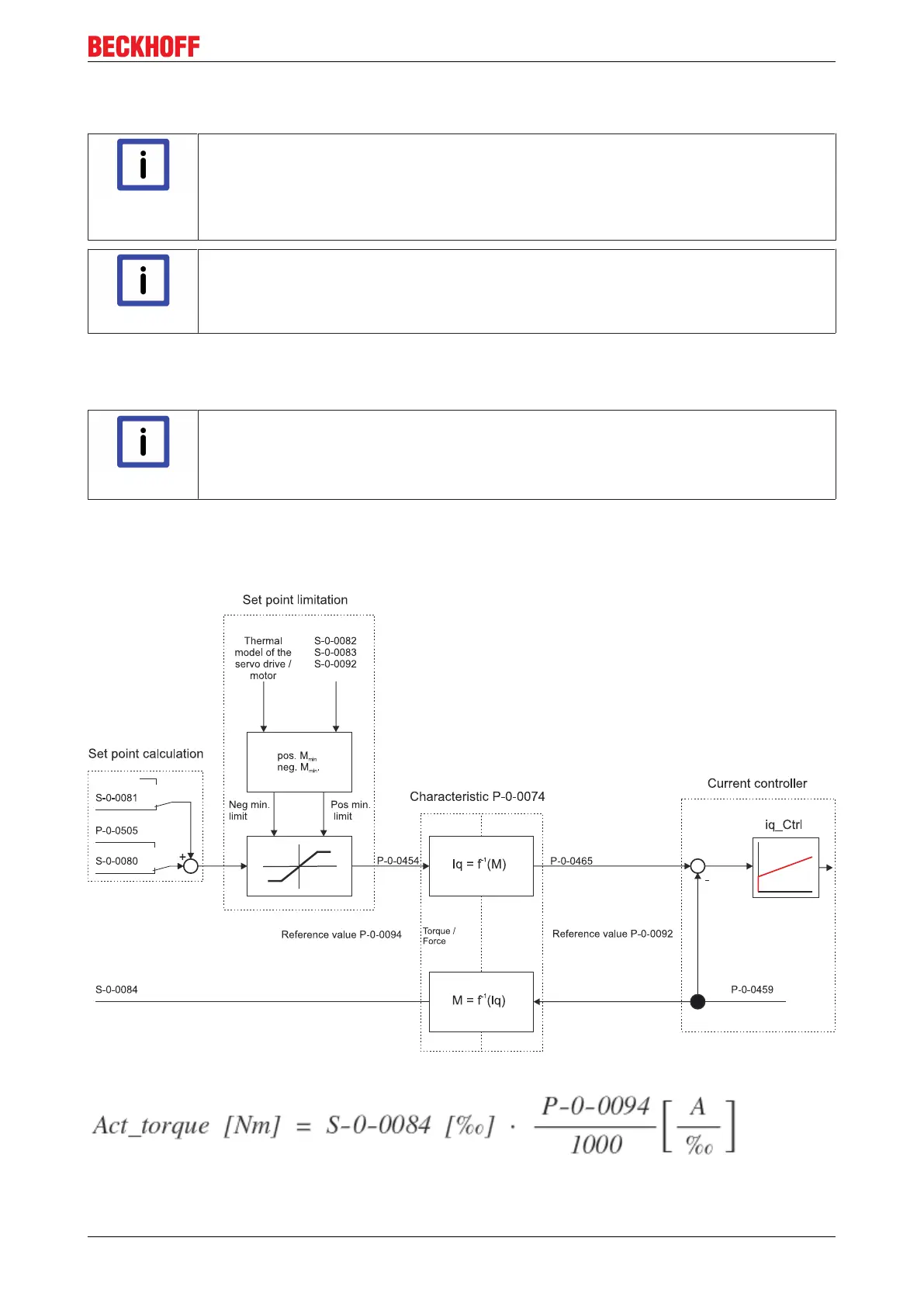
Parameters used for the torque (force) controller structure:
S-0-0080; S-0-0081, S-0-0082, S-0-0083, S-0-0084, S-0-0092, P-0-0002; P-0-0074,
P-0-0092, P-0-0094, P-0-0454, P-0-0459, P-0-0465, P-0-0505
18.1 Functionality from firmware v2.10
Note
Torque-Interface!
If the torque interface is active, the torque setpoint (S-0-0080) must be mapped directly in
the process data. The mapping then enables these process data to be linked externally
(NC / CNC / PLC).
The torque control structure is realized through a current controller and a proportionality relationship between
current and torque. The torque controller structure enables the torque requirement of the higher-level velocity
controller to be met. The characteristic torque/current curve therefore maps the motor characteristics
(saturation effect).
This results in the following relationships for representing the torque:

 Loading...
Loading...



