Modulo
Function description58
Version: 1.5
11.4.2 Exchange
The modulo position is no longer correct if the motor or servo drive is exchanged. To prevent mechanical
damage in the case of an uncontrolled restart, the servo drive starts with an initialization error, which leads to
the EtherCAT status being set to Err-PreOp.
The servo drive and the NC axes are thus not ready for operation and the drive cannot be activated. To
prevent inadvertent acknowledgement by the application program, this error cannot be acknowledged with
the reset command S-0-0099. Instead, the procedure described in the section Resetting the modulo error
[}59] must be followed.
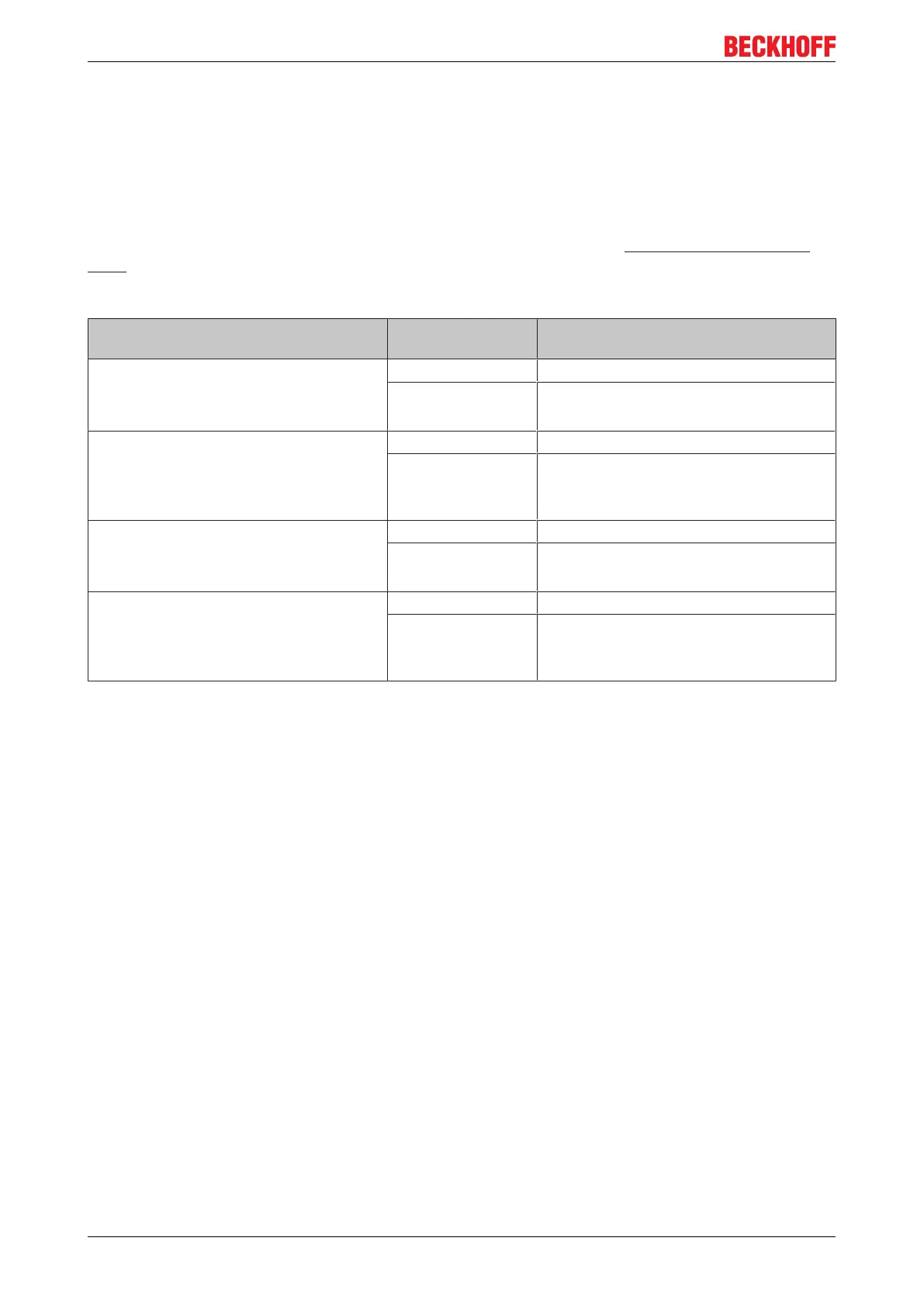
The table below shows various exchange cases and the corresponding behavior with the firmware v2.06:
Modulo / exchange scenario P-0-0275 Modulo parameter, saved in the servo
drive
• Motor exchanged;
• New motor from the stores;
• Encoder memory is empty
EtherCAT State Err PreOP
DriveStatus Error: F351 – Initialization data invalid
• Motor exchanged;
• Old motor;
• Motor already has a position offset
saved in the encoder memory
EtherCAT State Err PreOP
DriveStatus Error: F351 – Initialization data invalid
• Servo drive exchanged;
• New servo drive from the stores;
• Servo drive memory empty
EtherCAT State Err PreOP
DriveStatus Error: F350 – no saved data could be
loaded
• Servo drive exchanged;
• Old servo drive;
• Servo drive already has modulo data
saved in the servo drive memory
EtherCAT State Err PreOP
DriveStatus Error: F351 – Initialization data invalid
 Loading...
Loading...




