Velocity - Controller Structure
Function description 85
Version: 1.5
20 Velocity - Controller Structure
Note
Terminology
The terminology used in this documentation primarily refers to
rotary motors (e.g. actual velocity value).
Note
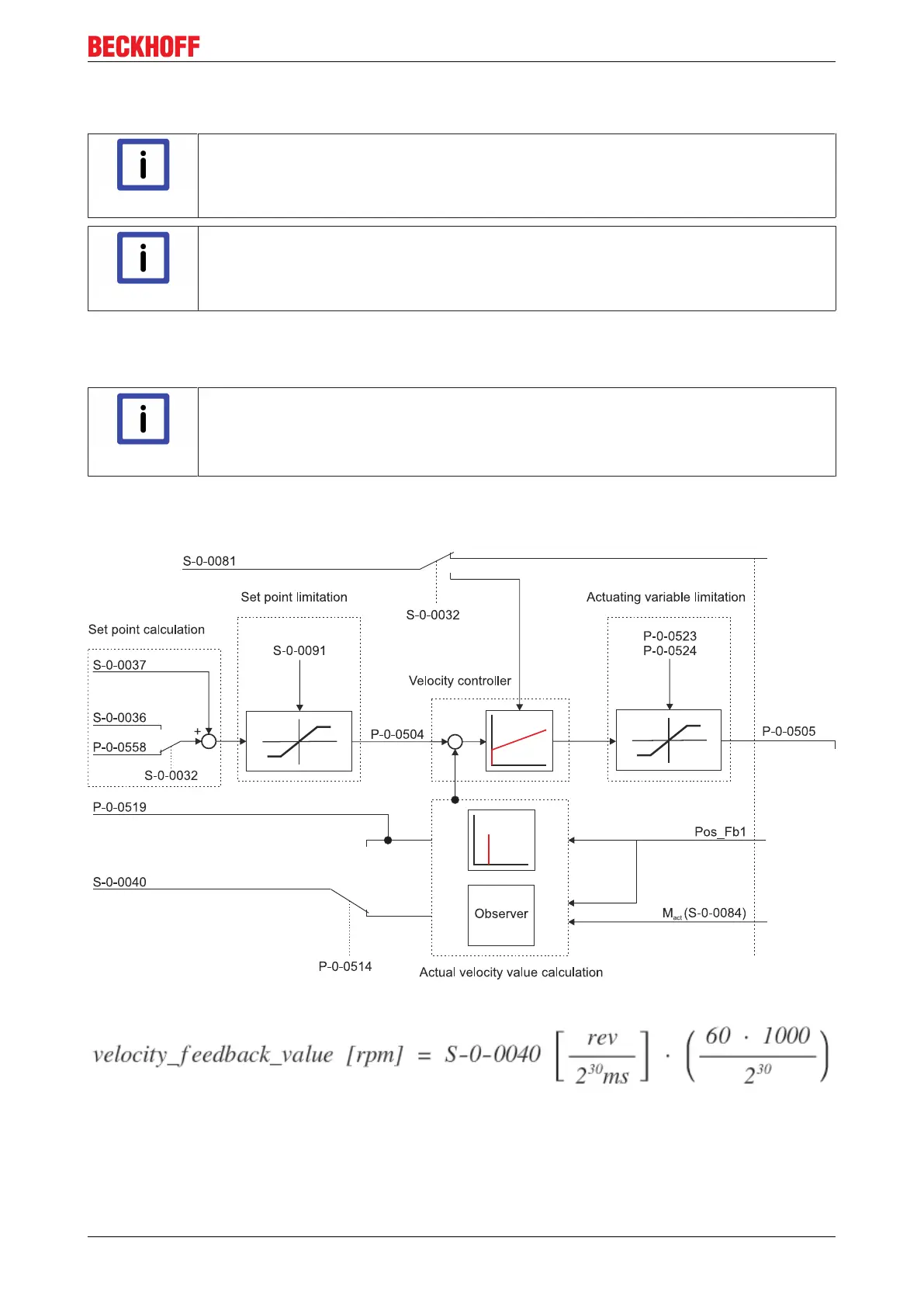
Reference values for the velocity controller structure:
S-0-0032; S-0-0036; S-0-0037; S-0-0040; S-0-0081; S-0-0084; S-0-0091; P-0-0003;
P-0-0504; P-0-0505; P-0-0514 P-0-0519; P-0-0523; P-0-0524; P-0-0558
20.1 Functionality from firmware v2.10
Note
Velocity-Interface!
If the velocity interface is active, the velocity command value (S-0-0036) must be mapped
directly in the process data. The mapping then enables these process data to be linked ex-
ternally (NC / CNC / PLC).
The velocity controller structure is realized via velocity controllers and modules for determining the actual
velocity value. The velocity controller structure enables compliance with the speed requirements of the
higher-level position controller.
This results in the following relationship for the velocity values:
Parameter P-0-0519 contains the result of the differentiation of the position signal. It has the same units as
parameter S-0-0040. The origin of parameter S-0-0040 depends on the settings in parameter P-0-0514.

 Loading...
Loading...



