2506/05
8.5.7 0x6049/n Velocity deceleration
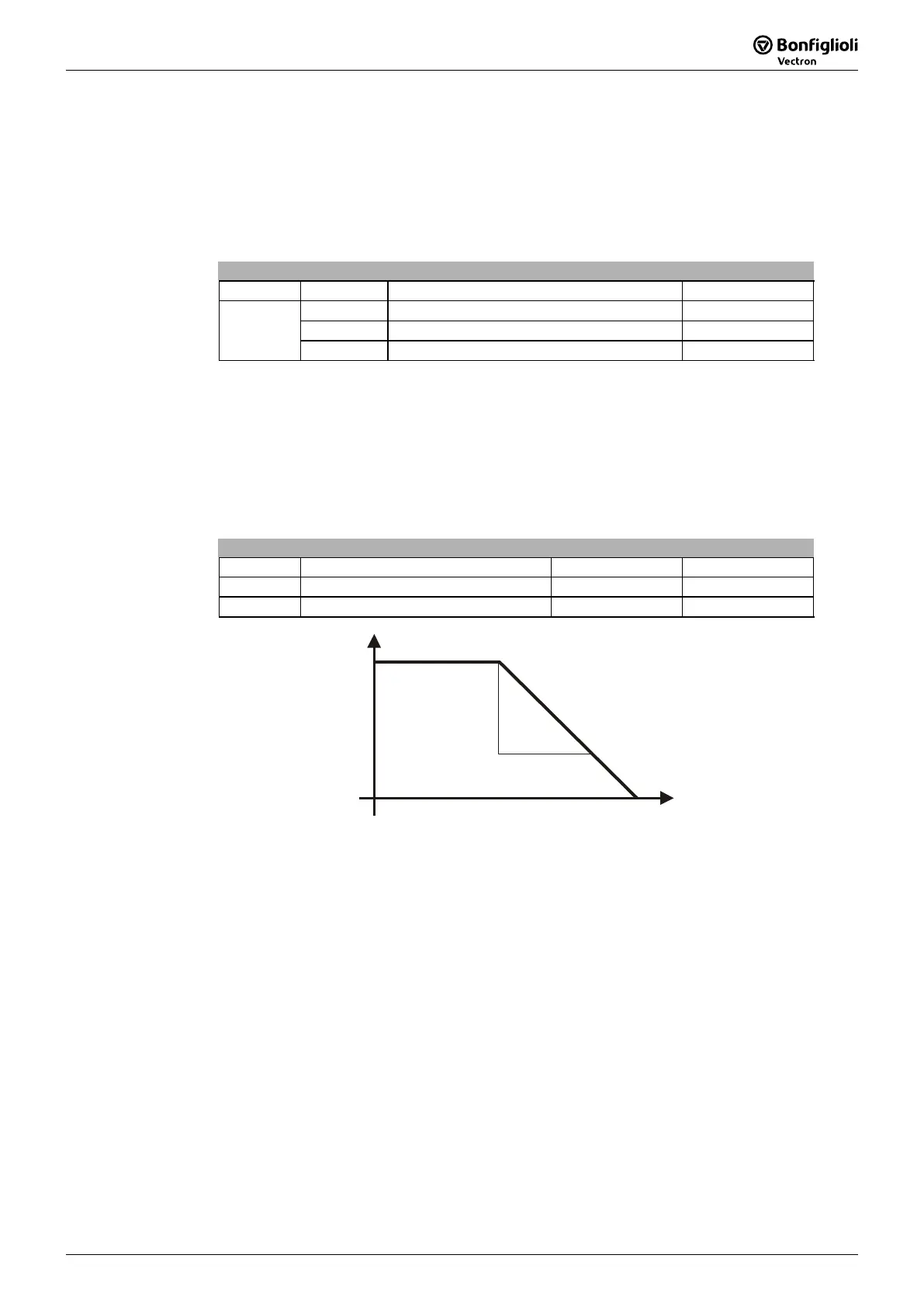
The change of speed and deceleration time are set with the object velocity
deceleration. The object velocity deceleration defines the value delta speed in the
same notation (RPM) as the ob
ect tar
et velocity via subindex 1 and the value delta
time in seconds via subindex 2.
Velocity acceleration
Index Subindex Meaning Value
0x6049 0 Number of entries (unsigned 8) 2
1 Delta speed (RPM) (unsigned 32)
2 Delta time (sec) (unsigned 16)
The gradient of the frequency in deceleration is internally written onto the parameters
Deceleration (clockwise) 421 and Deceleration (anti-clockwise) 423 in the first data
set. The two parameters are set to the same value, which is specified via the ob
ec
velocity acceleration.
The gradient is internally changed by chan
in
the ob
ects delta time or delta speed.
Chan
in
the ob
ect value for delta speed, which is internally converted into the uni
Hz, is sufficient for a change of the gradient.
Parameter Setting
No. Object Min. Max.
0x6049/1 Delta speed (RPM) 1 65536
0x6049/2 Delta time (sec) 1 65535
delta speed
delta time
time
speed
Note:
he ob
ect delta time is always set to the ob
ect value = 1 after the rese
of the frequency inverter.