EM-RES-03 10/0744
5.12 Control parameters
For the monitoring of the system bus and the display of the internal states, two con-
trol parameters are provided. There is a report of the system bus state and a report
of the CAN state via two actual value parameters.
The parameter
Node-State 978 gives information about the Pre-Operational, Opera-
tional, Stopped state. A PDO transfer is only possible in the Operational state. The
state is controlled by the system bus master (PLC / PC / frequency inverter) via NMT
telegrams.
The parameter
CAN-State 979 gives information about the state of the physical
layer. If there are transmission errors, the state changes from OKAY to WARNING
until the cancellation of the communication with BUS-OFF. After BUS-OFF, the CAN
controller is automatically re-initialized and the system bus started again.
Note: If the BUS-OFF state occurs, the frequency inverter breaks down with
"F2210 BUS-OFF".
After Bus-OFF, the system bus in the frequency inverter is completely reinitialized.
There is a new boot-up message from the subscriber and an emergency telegram
with the Bus-OFF message is transmitted. The change of state of the subscriber to
Operational is done by the Start-Remote-Node telegram cyclically sent by the system
bus master.
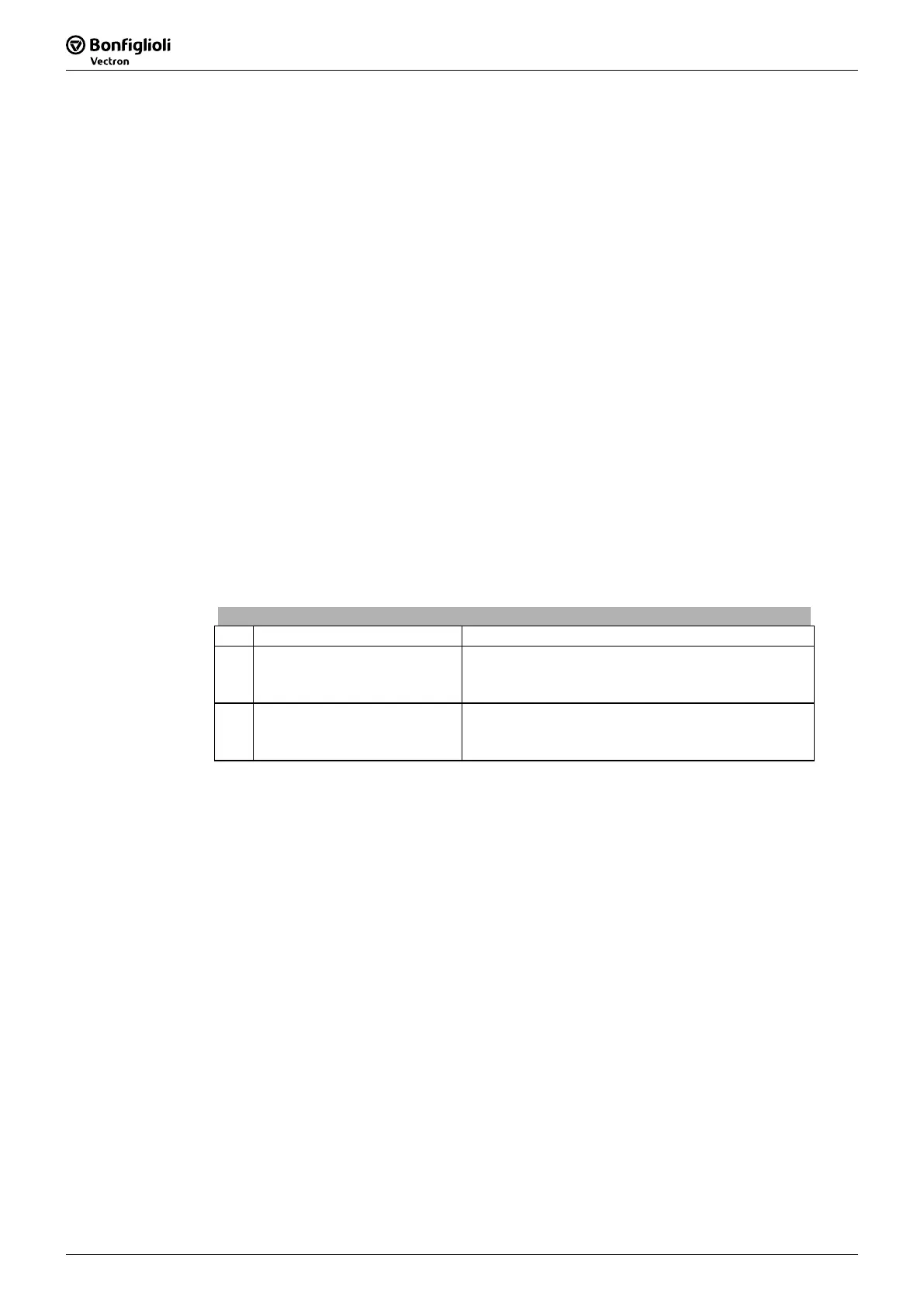
Actual values of the system bus
No. Description Display
978 Node-State 1 - Pre-Operational
2 - Operational
3 - Stopped
979 CAN-State 1 - OKAY
2 - WARNING
3 - BUS-OFF

 Loading...
Loading...






