5.4 Technical data encoder MSK motors
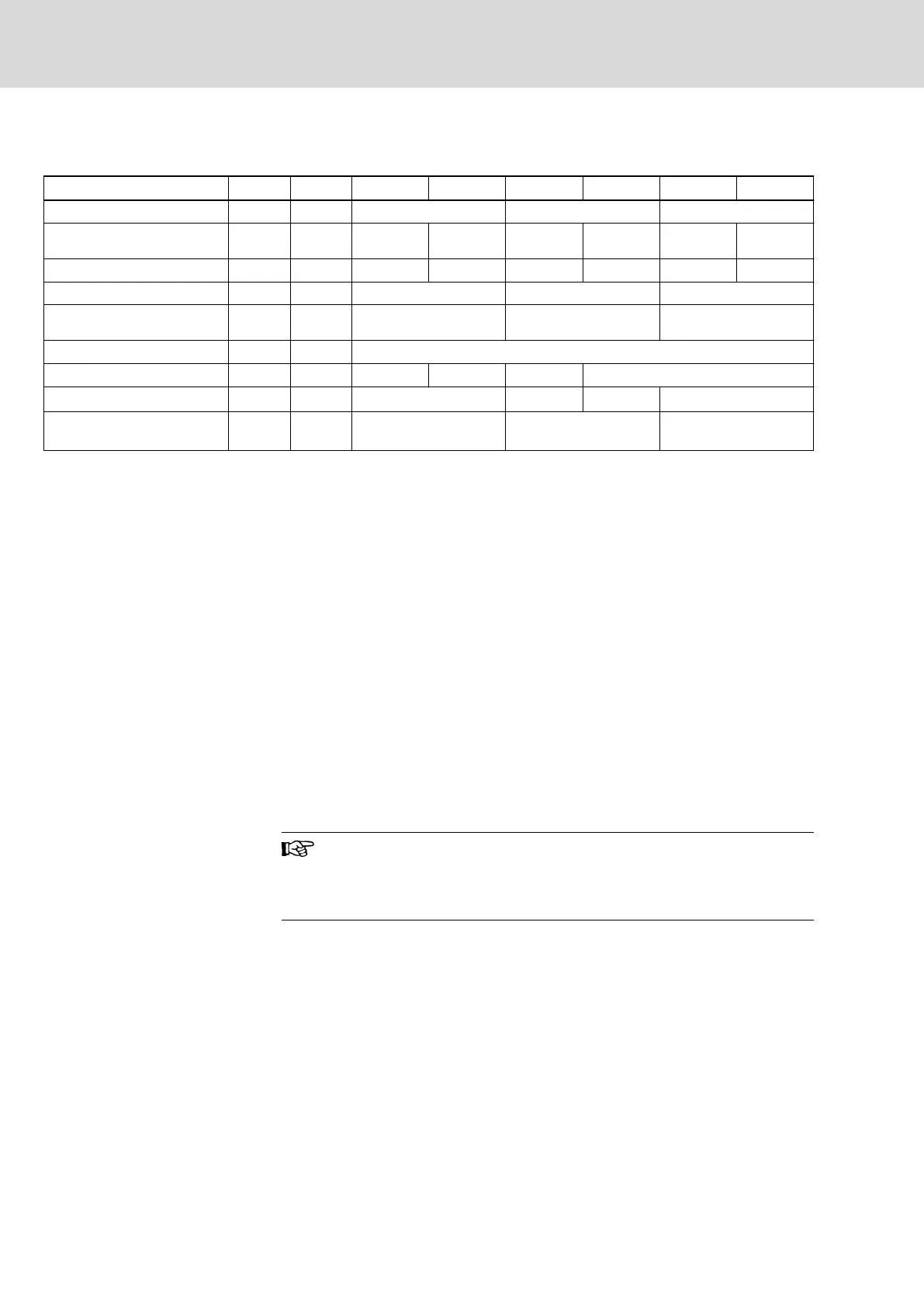
Designation Symbol Unit S1 M1 S2 M2 S3 M3
Interface Hiperface EnDat 2.1 Hiperface
Encoder design
Singleturn
absolute
Multiturn
absolute
Singleturn
absolute
Multiturn
absolute
Singleturn
absolute
Multiturn
absolute
Distinguishable revolutions 1 4,096 1 4,096 1 4,096
Signal periods 128 2,048 16
System accuracy
Angular
seconds
±120 ±20 ±520
Output signal 1Vss
Maximum encoder speed
min
-1
12,000 9,000 15,000 12,000
Max. current consumption
I
Encoder
mA 60 150 250 50
Supply voltage
VCC
En‐
coder
V 7...12 3.6...14 7...12
Tab. 5-3: Technical data MSK encoder
Calculate position resolution
The actual position resolution can be done for every encoder type according
to the following calcuation.
Calculation example: "Position resolution for M1 encoder"
from table:
Distinguishable revolutions: 4,096
Number of lines 128
out of documentation about the controllers:
Encoder resolution
1)
: 13 bit
Position resolution = number of lines x resolution of encoder x distinguishable
revolutions
Position resolution = 128 × 2
13
× 4,096 = 4,294,967,296 Information
1)
Encoder resolution depends from the connected controller.
Encoder Singleturn S1, S2, S3
These encoders permit absolute, indirect position recording within one me‐
chanical rotation. The encoders replace separate incremental encoders on
the motor.
After a power failure or after the first POWER ON, the axis must
always at first be moved to its home position.
Exception: Applications in which the maximum working path is
within one mechanical rotation of the motor.
Encoder Multiturn absolute M1,
M2, M3
These encoders permit absolute, indirect position recording within 4,096 me‐
chanical rotations. The encoders replace a separate absolute value encoder
on the motor. With this encoder version, the absolute position of the axis is
preserved even after a switch-off.
Bosch Rexroth AG DOK-MOTOR*-MSK*EXGIIK3-PR09-EN-P36/175
Synchronous Servomotors MSK For Potentially Explosive Areas
Technical data