NVF5 Series User Manual Chapter 6 Parameter Function Description
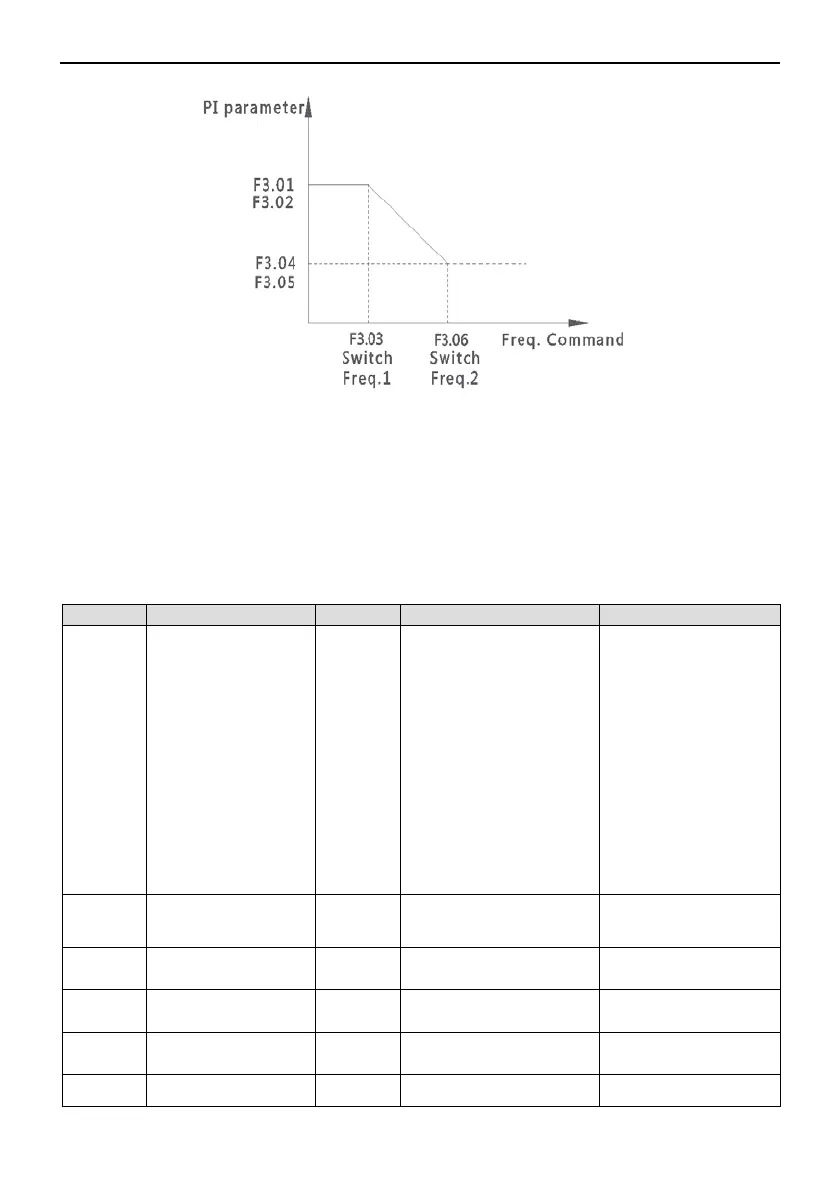
Figure 6-6-1 Speed Loop PI Parameter Switch
● Speed loop slip compensation coefficient
This parameter can adjust the accuracy of motor speed stability. When the frequency
of the motor is lower than the output frequency of the inverter, the parameter can be
increased. The adjustment of this parameter will affect the inverter output current of the
same load,when the load capacity is weaker in the low speed, this parameter can be
appropriately increased.
6.6.2 Vector Torque Control Mode Setting
F3.19
Selection
0
0 ~ 7
0:Integral Keypad
1:AI1
2:AI2
3:Reserve
4:HDI High Speed
Pulse Reference
5:Reserve6:MIN
(AI1, AI2)
7:MAX(AI1, AI2)
F3.20
Torque Setting
0.0%
(-300.0 ~ +300.0)
F3.21
Speed→Torque
Switch Point
100.0%
(0.0 ~ 300.0)%
100% Initial Torque
Setting
F3.22
0ms
(0 ~ 1000)ms
F3.23
Torque Reference
Filter Time
0 s
(0 ~ 65535)s
F3.24
0.10s
(0.00 ~ 650.00)s
- 69 -