© Danfoss | August 2018 AQ00000211 | 49
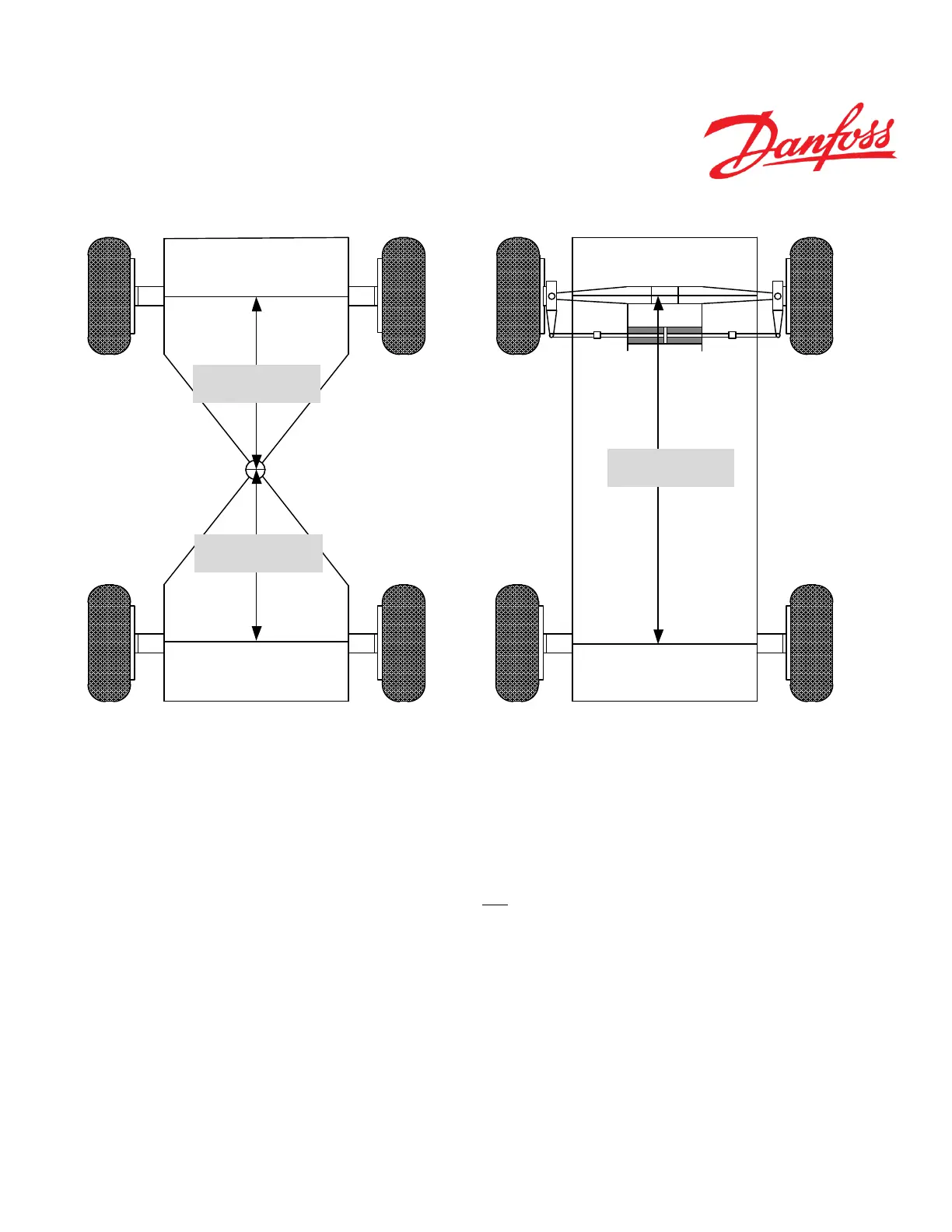
Wheel base A;
P3422
Wheel base A;
P3422
Wheel base B;
P3424
Articulated steering geometry
Ackermann/two wheeled
steering geometry
Figure 16
For Ackermann, P3426 and P3428 indicate the maximum steering angle (left and right) for the center point, in center of
the front axle, given in degrees, each with reference to straight ahead (see Figure ).
For Ackermann model, the algorithm uses the center point of the front axle. The maximum steer angles can be determined
by steering the vehicle into the smallest circle possible (steering to end stop). From the radius acquired (measured from
the center of the rear axle) and the wheel base knowledge, the angle Θ can be calculated, which is equal to P3426 when
steering in a circle to the left and P3428 when steering in a circle to the right.
= tan