[1] Warning
[2] * Trip
[3] Jog
[4] Freeze Output
[5] Max Speed
[6] Switch to Open Loop
[7] Select Setup 1
[8] Select Setup 2
[9] Select Setup 3
[10] Select Setup 4
[11] stop & trip
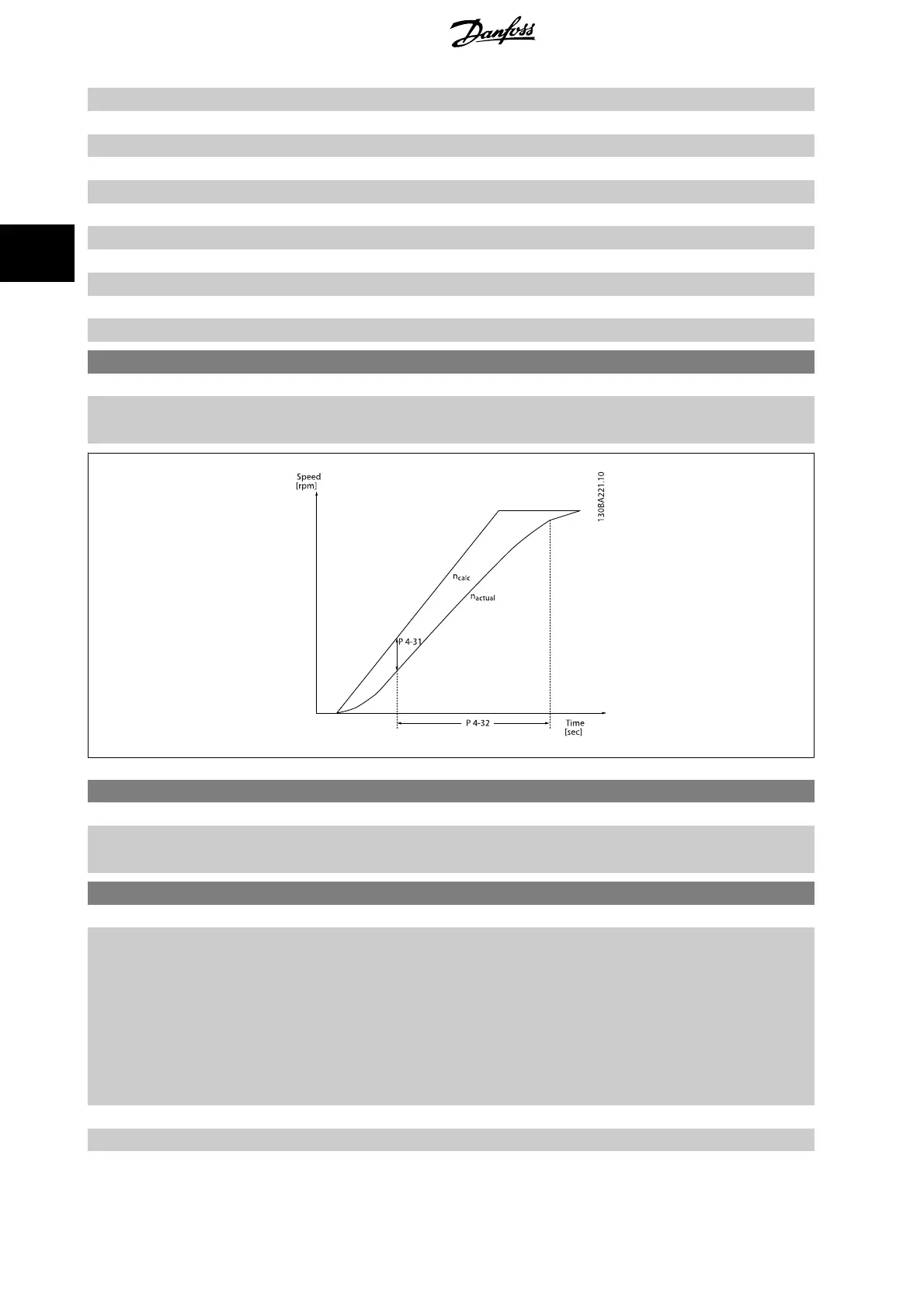
4-31 Motor Feedback Speed Error
Range: Function:
300 RPM* [1 - 600 RPM] Select the max allowed tracking error in speed from the calculated and the actual mechanical shaft
output speed.
4-32 Motor Feedback Loss Timeout
Range: Function:
0.05 s* [0.00 - 60.00 s] Set the timeout value allowing the speed error set in par. 4-31
Motor Feedback Speed Error
to be
exceeded.
4-34 Tracking Error Function
Option: Function:
Select which reaction the frequency converter should take if a tracking error is detected.
Closed Loop: The tracking error is measured between the output from the ramp generator and the
speed feedback (filtered).
Open Loop: The tracking error is measured between the output from the ramp generator - com-
pensated for slip - and the frequency that is sent to the motor (16-13).
The reaction will be activated if the measured difference is more than specified in par. 4-35 for the
time specified in par. 4-36.
A tracking error in closed loop does not imply that there is a problem with the feedback signal! A
tracking error can be the result of torque limit at too big loads.
[0] * Disable
[1] Warning
[2] Trip
3 Parameter descriptions FC 300 Programming Guide
88
MG.33.M8.02 - VLT
®
is a registered Danfoss trademark
3

 Loading...
Loading...











