[3] Trip after stop
4-35 Tracking Error
Range: Function:
10 RPM* [1 - 600 RPM] Enter the maximum permissible speed error between the motor speed and the output of the ramp
when not ramping. In open loop the motor speed is estimated and in closed loop it is the feedback
from encoder/resolver.
4-36 Tracking Error Timeout
Range: Function:
1.00 s* [0.00 - 60.00 s] Enter the time-out period during which an error greater than the value set in par. 4-35
Tracking
Error
is permissible.
4-37 Tracking Error Ramping
Range: Function:
100 RPM* [1 - 600 RPM] Enter the maximum permissible speed error between the motor speed and the output of the ramp
when ramping. In open loop the motor speed is estimated and in closed loop it is the feedback from
encoder/resolver.
4-38 Tracking Error Ramping Timeout
Range: Function:
1.00 s* [0.00 - 60.00 s] Enter the time-out period during which an error greater than the value set in par. 4-37
Tracking
Error Ramping
while Ramping is permissible.
4-39 Tracking Error After Ramping Timeout
Range: Function:
5.00 s* [0.00 - 60.00 s] Enter the time-out period after ramping where par. 4-37
Tracking Error Ramping
and
par. 4-38
Tracking Error Ramping Timeout
are still active.
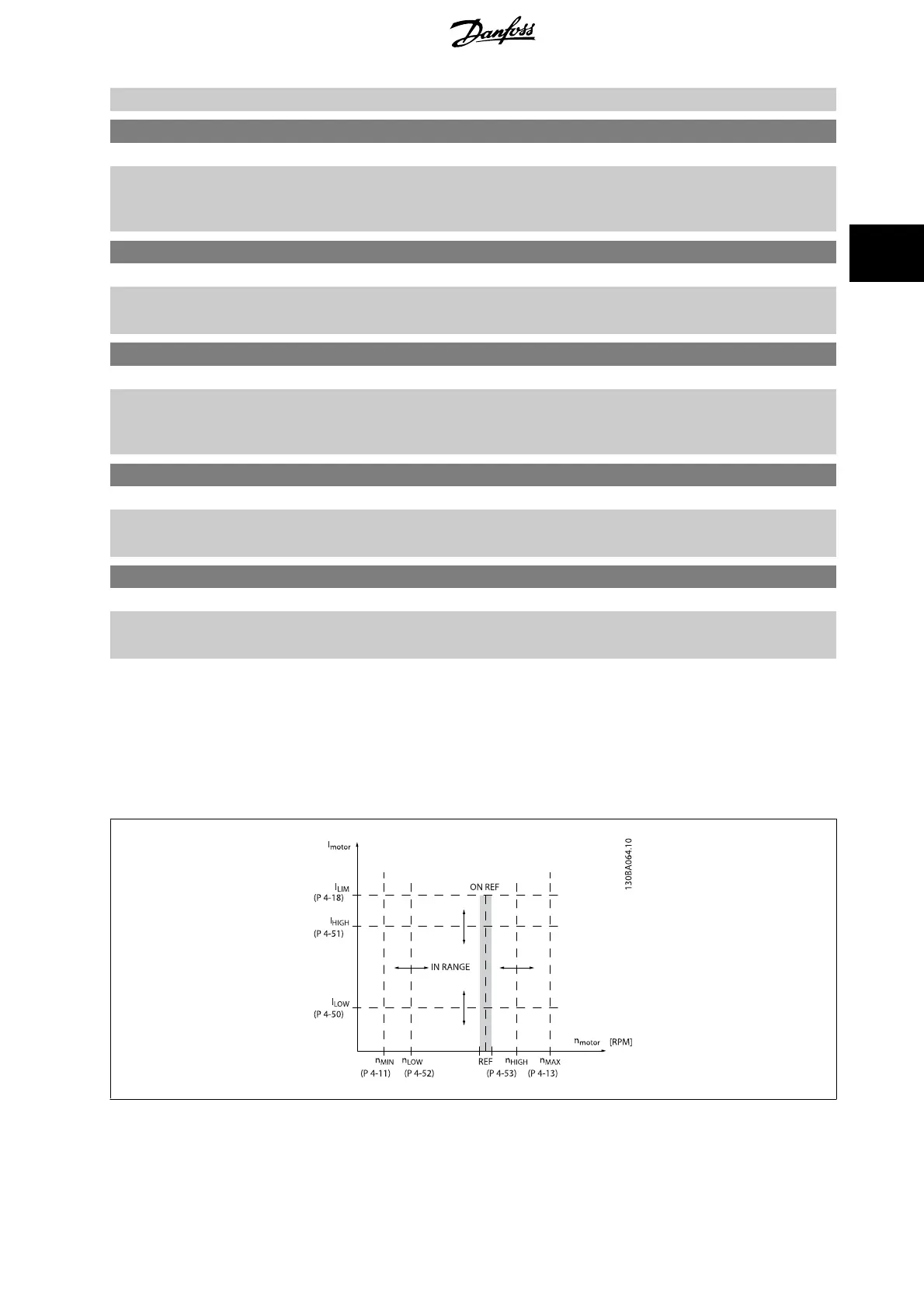
3.6.4 4-5* Adjustable Warnings
This is where adjustable warning limits for current, speed, reference and feedback can be defined. Warnings that are shown on the display can be
programmed as an output or sent via serial bus.
Warnings are shown on display, programmed output or serial bus.
FC 300 Programming Guide 3 Parameter descriptions
MG.33.M8.02 - VLT
®
is a registered Danfoss trademark
89
3

 Loading...
Loading...











