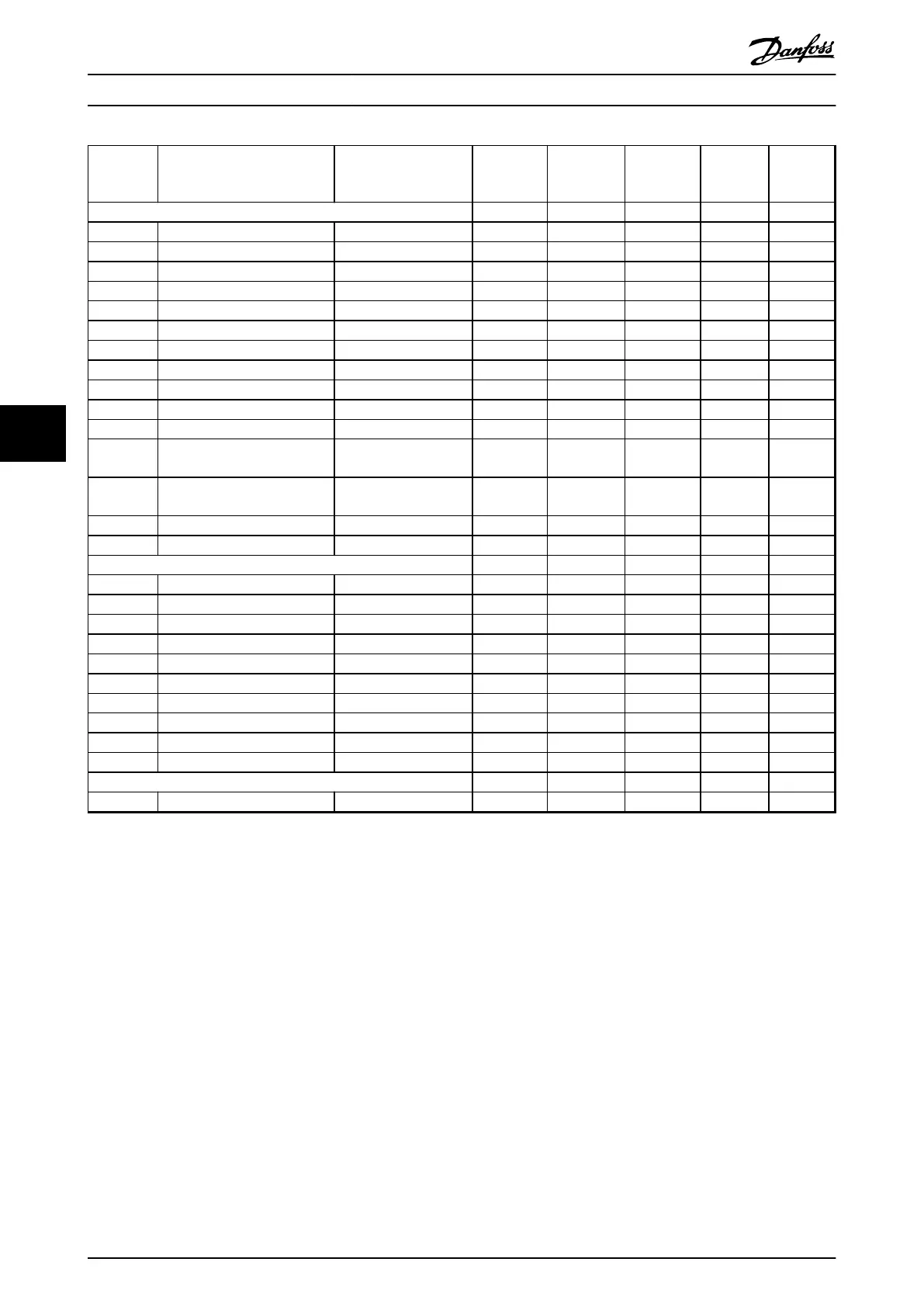
Par. No. # Parameter description Default value 4-set-up FC 302
only
Change
during
operation
Conver-
sion index
Type
32-6* PID Controller
32-60 Proportional factor 30 N/A 2 set-ups TRUE 0 Uint32
32-61 Derivative factor 0 N/A 2 set-ups TRUE 0 Uint32
32-62 Integral factor 0 N/A 2 set-ups TRUE 0 Uint32
32-63 Limit value for integral sum 1000 N/A 2 set-ups TRUE 0 Uint16
32-64 PID bandwidth 1000 N/A 2 set-ups TRUE 0 Uint16
32-65 Velocity feed-forward 0 N/A 2 set-ups TRUE 0 Uint32
32-66 Acceleration feed-forward 0 N/A 2 set-ups TRUE 0 Uint32
32-67 Max. tolerated position error 20000 N/A 2 set-ups TRUE 0 Uint32
32-68 Reverse behaviour for slave [0] Reversing allowed 2 set-ups TRUE - Uint8
32-69 Sampling time for PID control 1 ms 2 set-ups TRUE -3 Uint16
32-70 Scan time for profile generator 1 ms 2 set-ups TRUE -3 Uint8
32-71
Size of the control window
(activation) 0 N/A 2 set-ups TRUE 0 Uint32
32-72
Size of the control window
(deactiv.) 0 N/A 2 set-ups TRUE 0 Uint32
32-73 Integral limit filter time 0 ms 2 set-ups TRUE -3 Int16
32-74 Position error filter time 0 ms 2 set-ups TRUE -3 Int16
32-8* Velocity & Accel.
32-80 Maximum velocity (encoder) 1500 RPM 2 set-ups TRUE 67 Uint32
32-81 Shortest ramp 1.000 s 2 set-ups TRUE -3 Uint32
32-82 Ramp type [0] Linear 2 set-ups TRUE - Uint8
32-83 Velocity resolution 100 N/A 2 set-ups TRUE 0 Uint32
32-84 Default velocity 50 N/A 2 set-ups TRUE 0 Uint32
32-85 Default acceleration 50 N/A 2 set-ups TRUE 0 Uint32
32-86 Acc. up for limited jerk 100 ms 2 set-ups TRUE -3 Uint32
32-87 Acc. down for limited jerk 0 ms 2 set-ups TRUE -3 Uint32
32-88 Dec. up for limited jerk 0 ms 2 set-ups TRUE -3 Uint32
32-89 Dec. down for limited jerk 0 ms 2 set-ups TRUE -3 Uint32
32-9* Development
32-90 Debug source [0] Controlcard 2 set-ups TRUE - Uint8
Programming Operating Instructions
102 Danfoss A/S © Rev. 2014-07-29 All rights reserved. MG37A202
66

 Loading...
Loading...







