V0208, 2.6
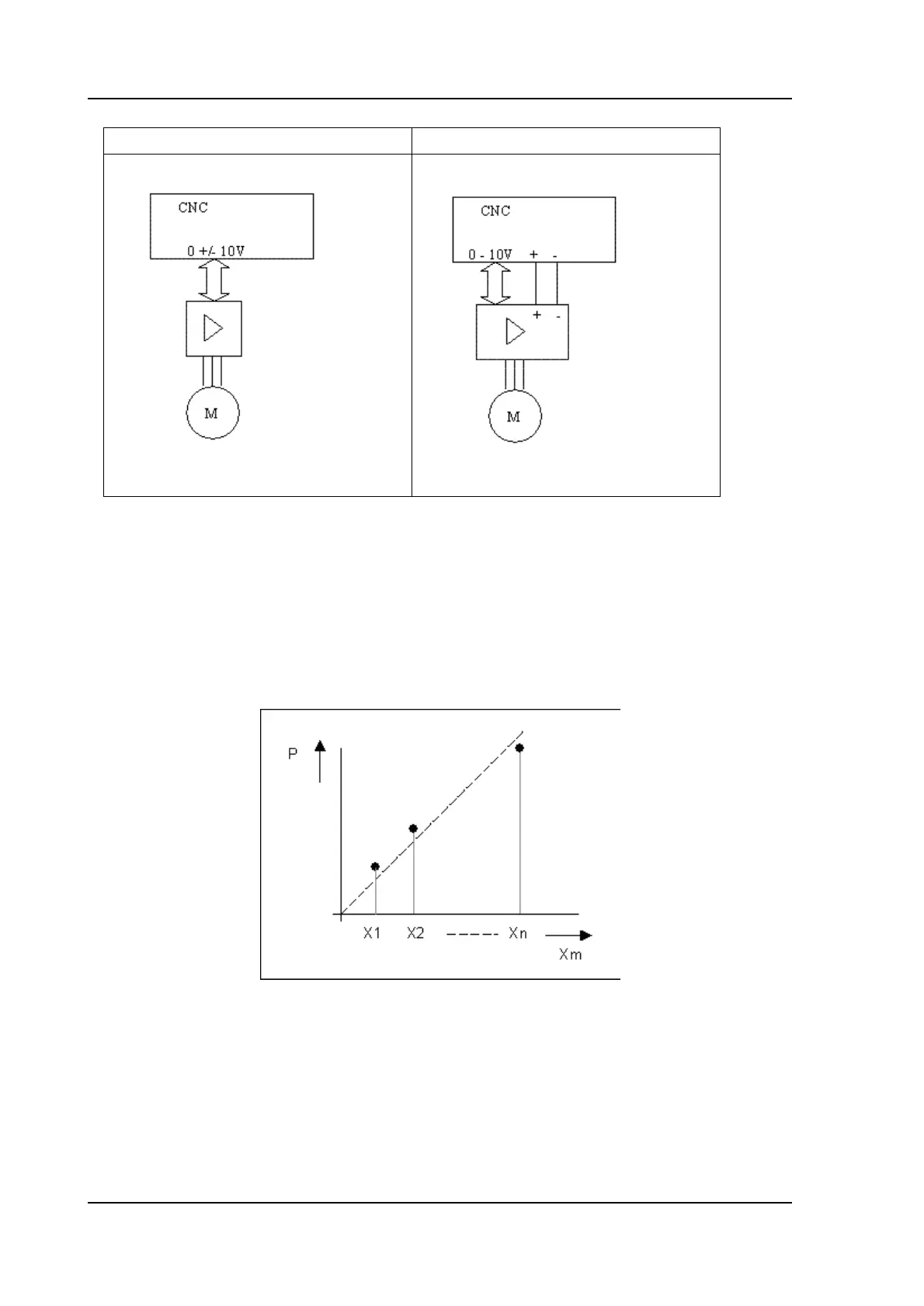
A unipolar system can be implemented for servo and AC drives.
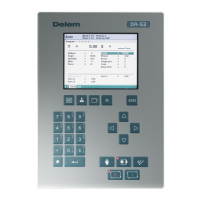
1.3. Spindle correction table
The spindle correction table is meant to overcome axis position errors due to mechanical
inaccuracies in the spindle.
If a spindle shows deviations then they should be measured systematically on certain
setpoints. From these setpoints, a table with corrections can be created.
Corrections are calculated as follows:
Cor = Xm - P
Xm = programmed position
P = measured position
Cor = the necessary correction
Bipolar: Unipolar: