Chapter 8 ParametersASDA-A2R Series
8-20 Revision December, 2014
Format:
DEC
Settings: 00:Motor feedback pulse number (after the scaling of
electronic gear ratio) [PUU]
01:Input pulse number of pulse command (after the scaling of
electronic gear ratio) [PUU]
02:Deviation between control command pulse and feedback
pulse number[PUU]
03:The number of motor feedback pulse [Encoder unit,
1,280,000 Pulse/rev]
04:Distance to command terminal (Encoder unit) [Pulse]
05: Error pulse number (after the scaling of electronic gear ratio)
(Encoder unit) [Pulse]
06:The frequency of pulse command input [Kpps]
07:Motor speed
[Permanent magnet synchronous rotary motor: r/min;
Permanentmagnet synchronous linear motor: m/s]
08:Speed command input [Volt]
09:Speed command input
[Permanent magnet synchronous rotary motor: r/min;
Permanentmagnet synchronous linear motor: m/s]
10:Torque (force) command input [Volt]
11:Torque (force) command input [%]
12:Average torque [%]
13:Peak torque [%]
14:Main circuit voltage (BUS voltage) [Volt]
15:Load/motor inertia ratio [0.1times]
16:IGBT temperature
17:The frequency of resonance suppression
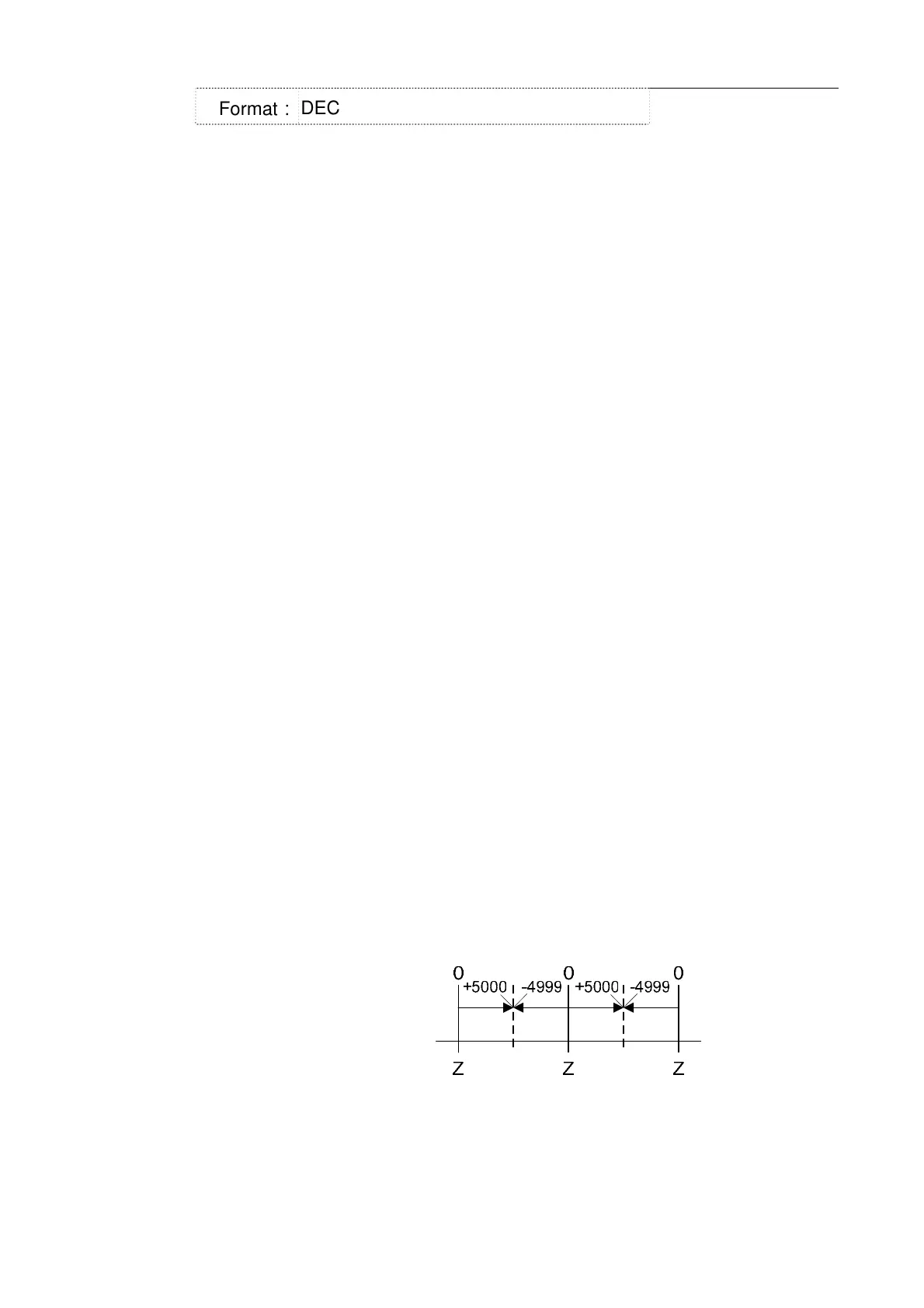
18:The distance from the current position to Z. The range of the
value is between -5000 and +5000;
The interval of the two Z-phase pulse command if 10000
Pulse.
19:Mapping Parameter #1:P0 - 25
20:Mapping Parameter #2:P0 - 26
 Loading...
Loading...
