ASDA-M Chapter 6 Control Mode of Operation
Revision December, 2014
6-37
Time Domain
Generally, instrument is needed when applying frequency domain for measurement.
Users are required to adopt the measurement techniques; while time domain only needs
a scope and goes with the analog input / output terminal provided by the servo drive.
Thus, time domain is frequently used to adjust PI controller. The abilities of PI controller
to deal with the resistance of torque load and the following command are the same.
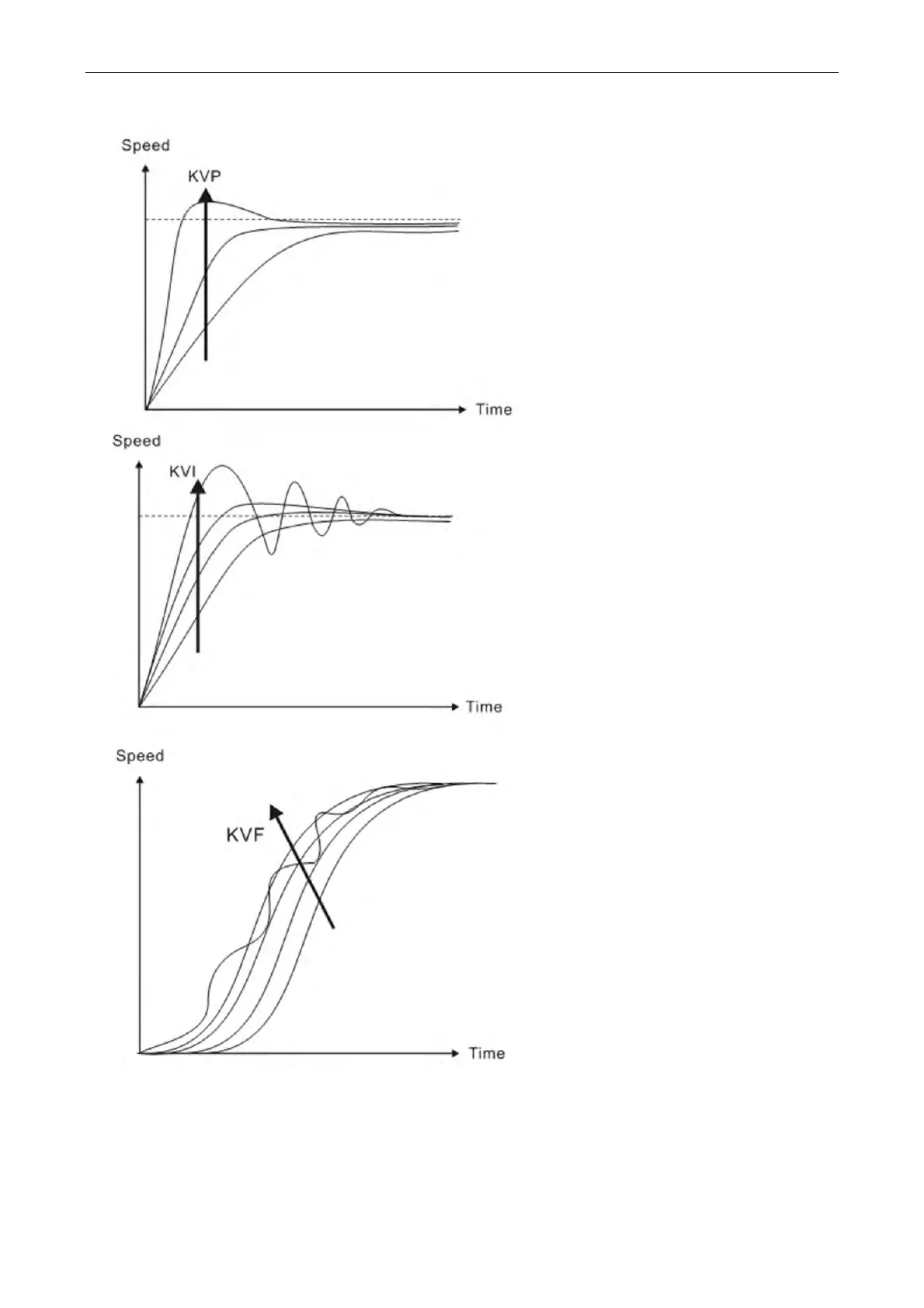
The bigger KVP value cause
higher bandwidth and shorten the
rising time. However, if the value is
set too big, the phase margin will
be too small.
To steady-state error, the result is
not as good as KVI. But it helps to
reduce the dynamic following error.
The bigger KVI value cause
greater low-frequency gain and
shorten the time the steady-state
error returns to zero. However, the
phase margin will dramatically
decrease as well.
To steady-state error, it is very
helpful but shows no benefit to
dynamic following error.
If the KVF value closes to 1, the
feed forward compensation will be
more complete and the dynamic
following error will become smaller.
However, if the KVF value is set
too big, it would cause vibration.
 Loading...
Loading...






