ASDA Series Application Note Chapter 4 Application Techniques
March, 2015 4-25
Position
D = 0, S = P5-63
0 PUU, INC
Complete the
unfinished position
command after the
speed is changed
Execute position
command
Write
DELAY = 0
P6-27 = 2
The next position
command (PR#13) after
complete the setting of
speed change
Jump to next position command
EV1
Operation
when
changing
the speed
Jump
DELAY = 0
PR#1
Position command
Trigger this PR when
changing the speed
Enable position command
Jump to PR#1 so that the
system can keeps operating
PR
#51
(I)
PR#1
Write the required speed to
PR#11 (P6-23) via the
controller. Then, this PR would
immediately change the speed
of position command.
EV2
PR
#52
(I)
PR#11
PR
#2
PR
#1
(I)
PR
#3
(I)
PR
#4
PR
#5
(I)
PR#1
PR#4
PR
#11
(I)
PR
#12
(I)
PR
#13
(I)
PR#4
Jump
DELAY = 0
PR#11
Write
DELAY = 0
P6-27 = 4
Write
DELAY = 0
P5-63 = 800
Jump
DELAY = 0
PR#1
Position
D = 0, S = 200 rpm
150000 PUU, INC
Position
D = 0, S = 200 rpm
-150000 PUU, INC
Jump
DELAY = 0
PR#4
Position command
The next position
command (PR#13) after
complete the setting of
speed change
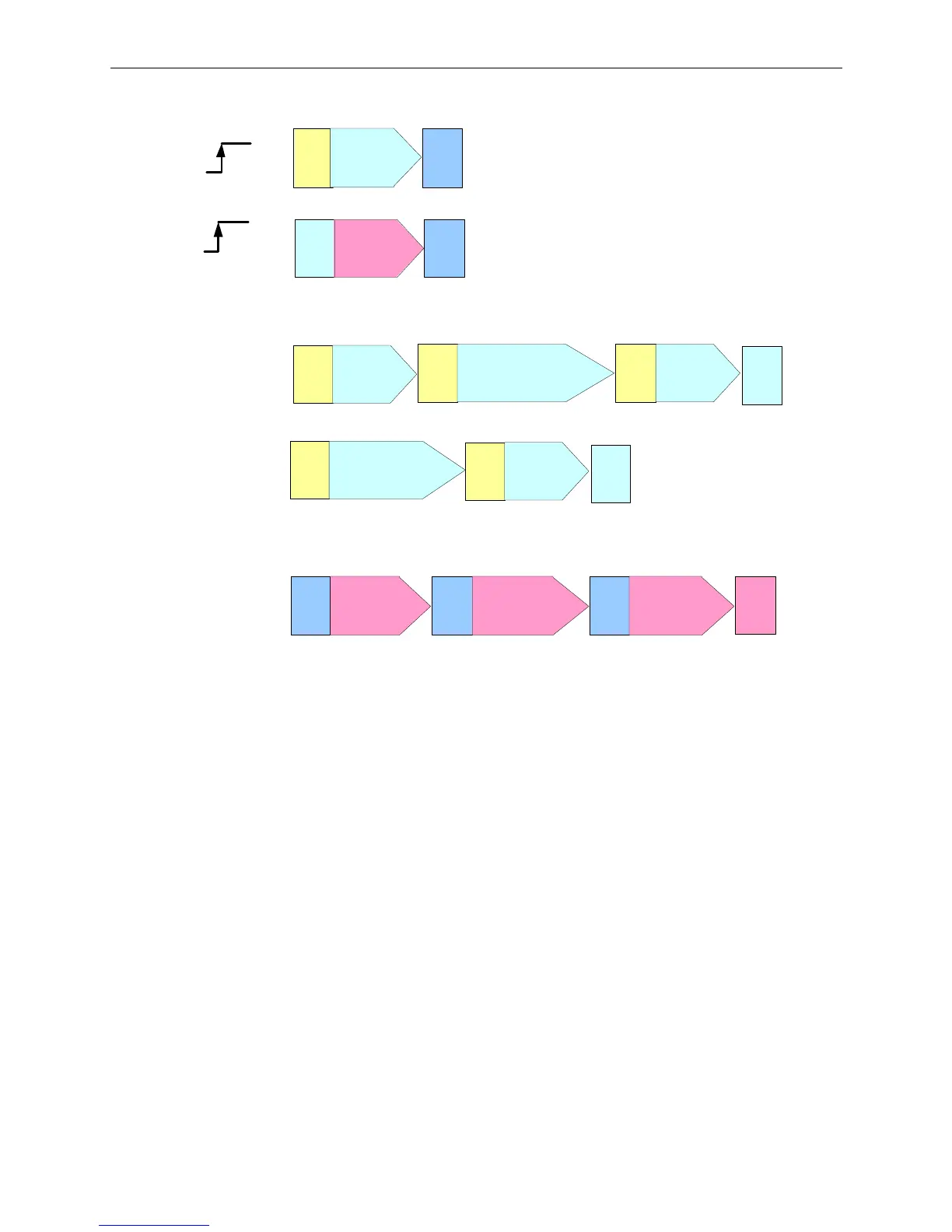
Figure 4.4.3 PR program

 Loading...
Loading...




