ASDA Series Application Note Introduction of PR Operation
March, 2015 1-41
command type, ABS stands for an absolute command, REL for relative command, INC
for incremental command, and CAP for capture command.
PR
#51
(I)
Position (3)
D = 0, S = 10.0 rpm
900 PUU, ABS
PR
#51
(I)
Position (3)
D = 0, S = 10.0 rpm
900 PUU, REL
PR
#51
Position (3)
D = 0, S = 10.0 rpm
900 PUU, INC
PR
#51
(I)
Position (3)
D = 0, S = 10.0 rpm
900 PUU, CAP
PR
#51
(I)
Position (2)
D = 0, S = 10.0 rpm
90 PUU, ABS
PR
#51
(I)
Position (2)
D = 0, S = 10.0 rpm
90 PUU, REL
PR
#51
Position (2)
D = 0, S = 10.0 rpm
90 PUU, INC
PR
#51
(I)
Position (2)
D = 0, S = 10.0 rpm
90 PUU, CAP
PR#51 with
interrupt
Type 2, finish
and stop.
Absolute
command to
90 PUU.
Relative
command to
90 PUU.
Incremental
command to
90 PUU.
Cap. relative
command to
90 PUU.
PR#51 without
interrupt
PR#51 with
interrupt
Type 3, finish and
Call next PR
PR#51 without
interrupt
Type 2 position command
Type 3 position command
Target speed
Delay = 0
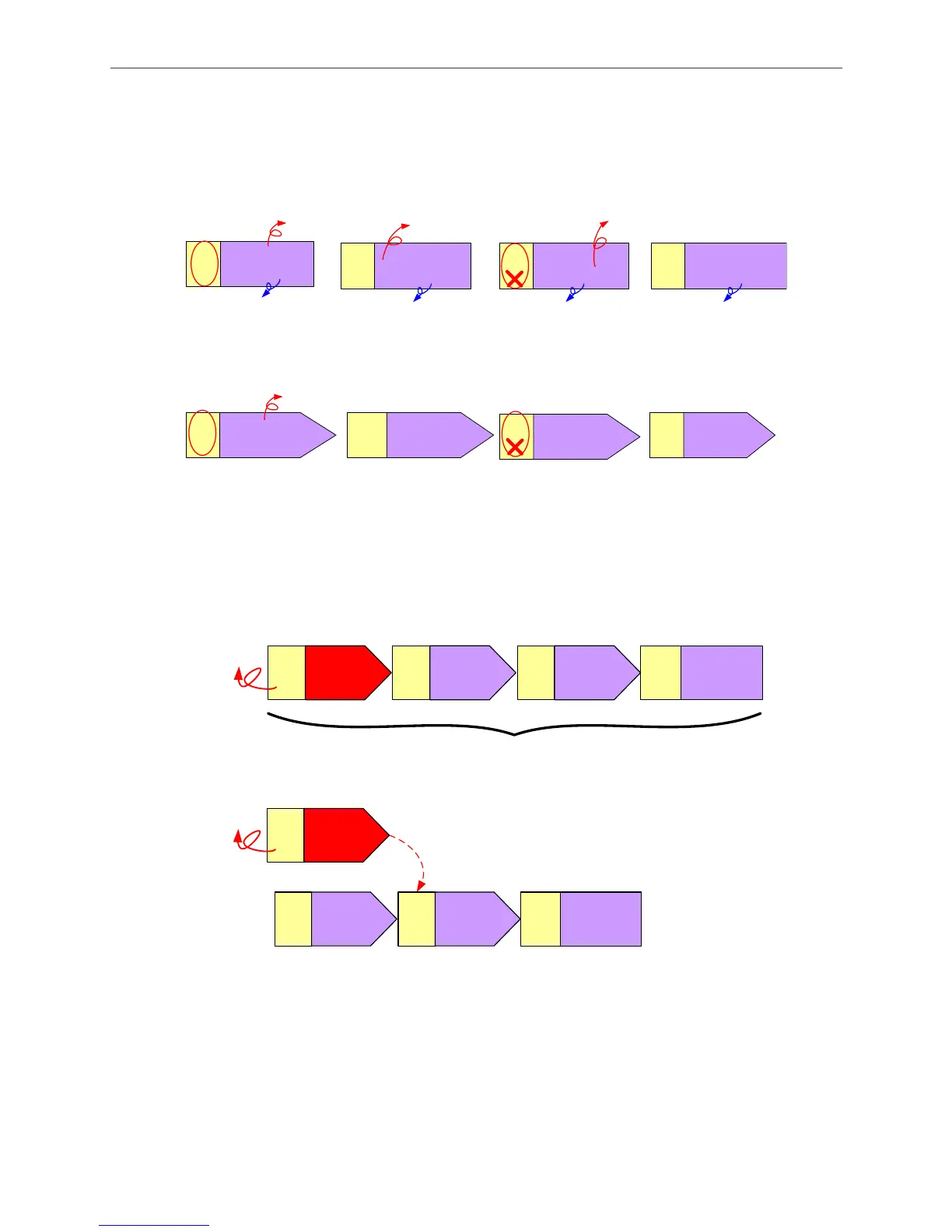
Figure 1.57 Position Command
When the system continuously carries out a series of PR paths, they are regarded as a PR group.
The first PR command in the group is called the Head PR, which is externally triggered. Jump
function or Auto function (automatically move to the next PR path) can be set in the Head PR to
continue carrying out other PR commands. See Figure 1.58.
PR
#5
(I)
PR
#6
(I)
PR
#7
(I)
PR
#8
(I)
Head PR
A PR group (PR#5, PR#6, PR#7, PR#8)
externally
triggered
PR
#10
(I)
Head PR
externally
triggered
PR
#39
(I)
PR
#40
(I)
PR
#41
(I)
A PR group (PR#10, PR#40, PR#41)
Figure 1.58 PR Group

 Loading...
Loading...




