Introduction of PR Operation ASDA Series Application Note
1-50
March, 2015
PR#11 / PR#12: Because PR#11 has no interrupt, it does not exist with PR#1, PR#2, and PR#10
in the PR executor at the same time (it is not categorized into the same PR group with PR#1,
PR#2 and PR#10); it will not enter the executor until the first PR group enters it after 1 ms.
PR#11 will not have any influence on the motion command of PR#1; on the other hand, it waits
for PR#1’s motion commands to be completed and then carry on. PR#12 and PR#11 will enter
the executor together and start to execute the command after PR#1 is completed. After this PR is
completed, 12 will be written to P5-55.
Result:
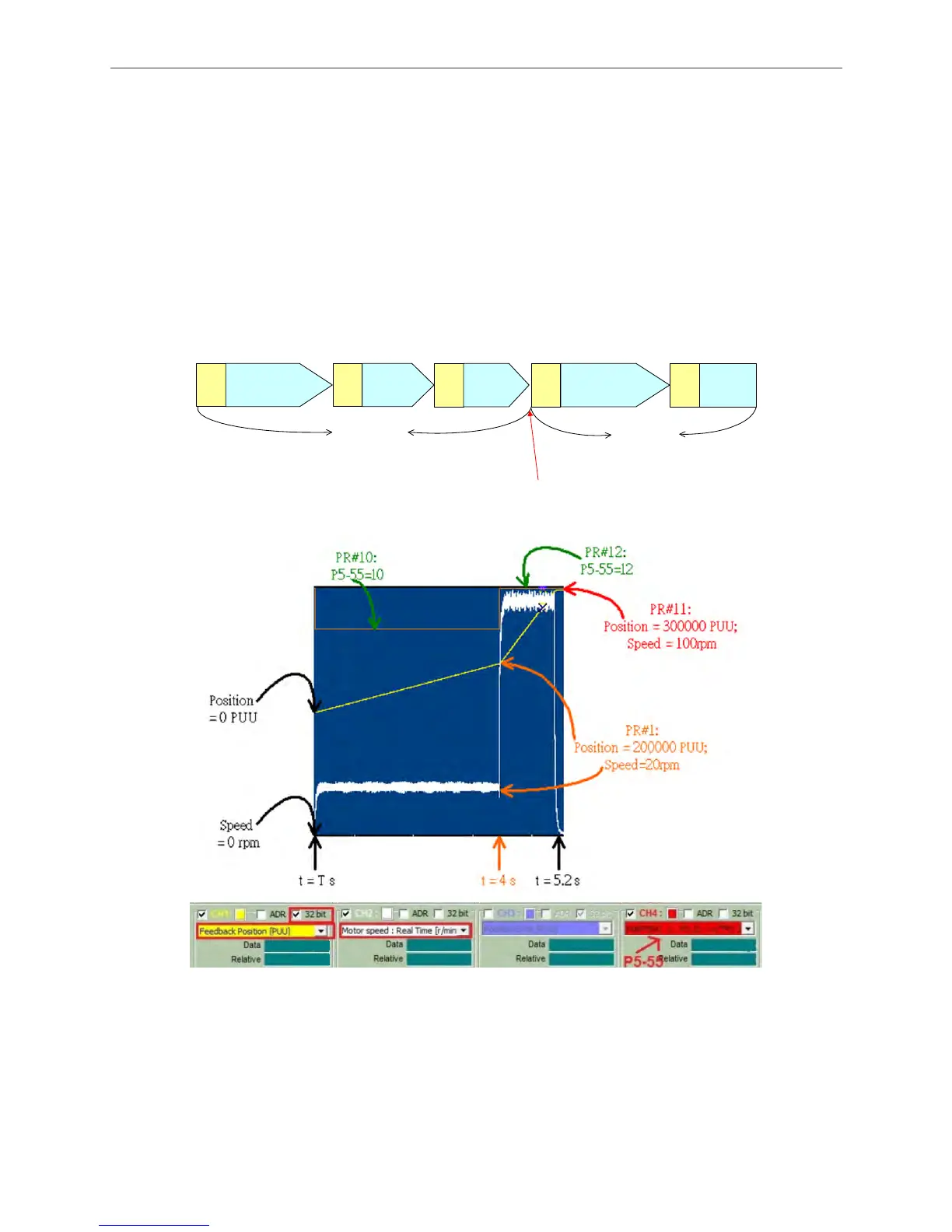
Figure1.67 shows the final result of PR procedure in Example 1.
(A ) 1ms
Command Group
(B ) 1ms
PR
#1
Position (3)
D=0, S = 20 .0 r p m
20 000 0 PUU , INC
PR
#2
(I)
Jump
DLY=0
PR#10
PR
#10
(I)
Write
DLY=0
P5-55=10
PR
#11
Pos ition (3 )
D=0, S= 100.0 rpm
30 000 0PUU, I NC
PR
#12
(I)
Write
DLY=0
P5-55=12
Command Group
Note: Each command
group is read within 1 ms
Command Group (A) and (B) have motion commands thus both of them
need motion command generator. However, as PR#11 has no interrupt
function, group (B) will not be executed until PR#1 is completed.
Figure 1.67 Output of PR Example 1
T: Operating start time of PR command
t = T ~ t = 4+T: Carry out PR#1, PR#2 and PR#10. Motor operates 200000 PUU at speed of 20
rpm; meanwhile, P5-55 is set to 10.
t = 4+T ~ t = 5.2+T: Carry out PR#11 and PR#12. Motor operates 300000 PUU at speed of 100
rpm; meawhile, P5-55 is set to 12.
21.2
21.2
10
10
---
---
660542
660542
 Loading...
Loading...





