ASDA Series Application Note Introduction of PR Operation
March, 2015 1-49
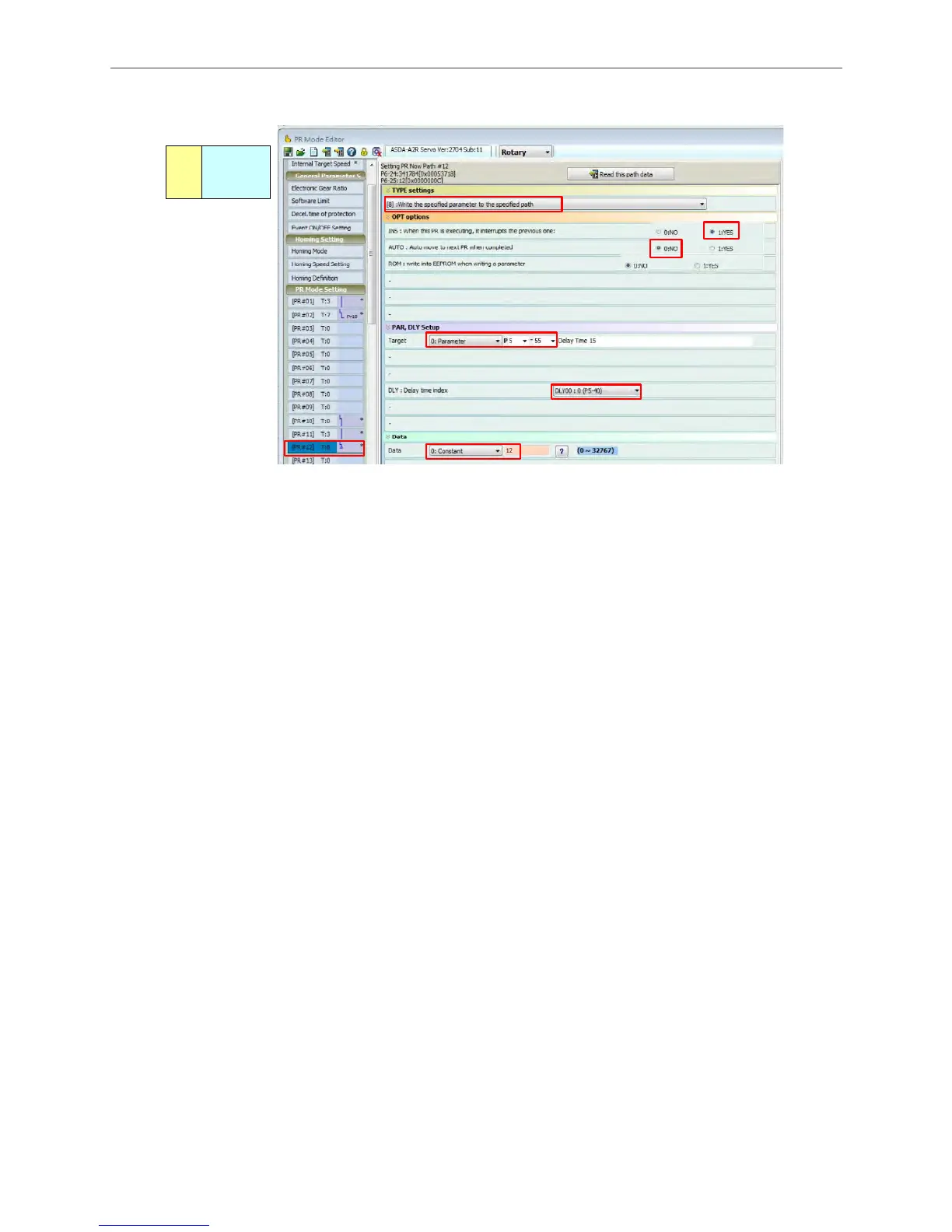
5. PR#12:
Figure 1.66 Settings of PR#12
a. Select path PR#12.
b. Select [8]: Write the specified parameter to the specified path at Type Settings.
c. Enable interrupt function; select When this PR is executing, it interrupts the
previous one as (1: YES).
d. As this PR is presented in a squared frame, please select No here and it will not
automatically move to the next PR when completed.
e. Select 0: Parameter and P5-55 as the target.
f. No delay time; set 0 here.
g. Select 0: Constant and enter 12 at section DATA.
PR Motion Analysis:
With the feature that the servo updating commands every 1 ms, when reading a series of PR
commands of different types, the first step is to arrange a series of PR commands into PR
groups. The key to it is to look for the PR command without interrupt function in the group. In
Figure 1.60, PR#1 and PR#11 have no interrupt, and PR#2 and PR#10 that following PR#1 have
the interrupt function; the following PR#12 have interrupt function as well. In this case, PR#1,
PR#2, and PR#10 in the executor will be the command group and executed in the first 1 ms;
PR#11 and PR#12 will be the command group in the next 1 ms. Because PR#1 is a motion
command, the second PR group (PR#11 and PR#12) will not be executed until the motion
command from PR#1 is completed.
PR#1 / PR#2 / PR#10: After entering PR executor, jump command PR#2 and write-in command
PR#10 will be completed here; meanwhile P5-55 is set to 10. As PR#1 is a motion command, it
will be distributed to the motion command generator to generate motion commands.
ⓐ
ⓑ
ⓒ
ⓓ
ⓔ
ⓕ
ⓖ
PR
# 12
(I)
Write
DLY =0
P5-55=12
 Loading...
Loading...





