way from DOG signal
DOG signal detected
Zero return direction
Speed (PPS)
DOG signal
falling-edge
triggered
Number of P 0 signals (N)
in zero return
G
Number of pulses (P)
in zero return
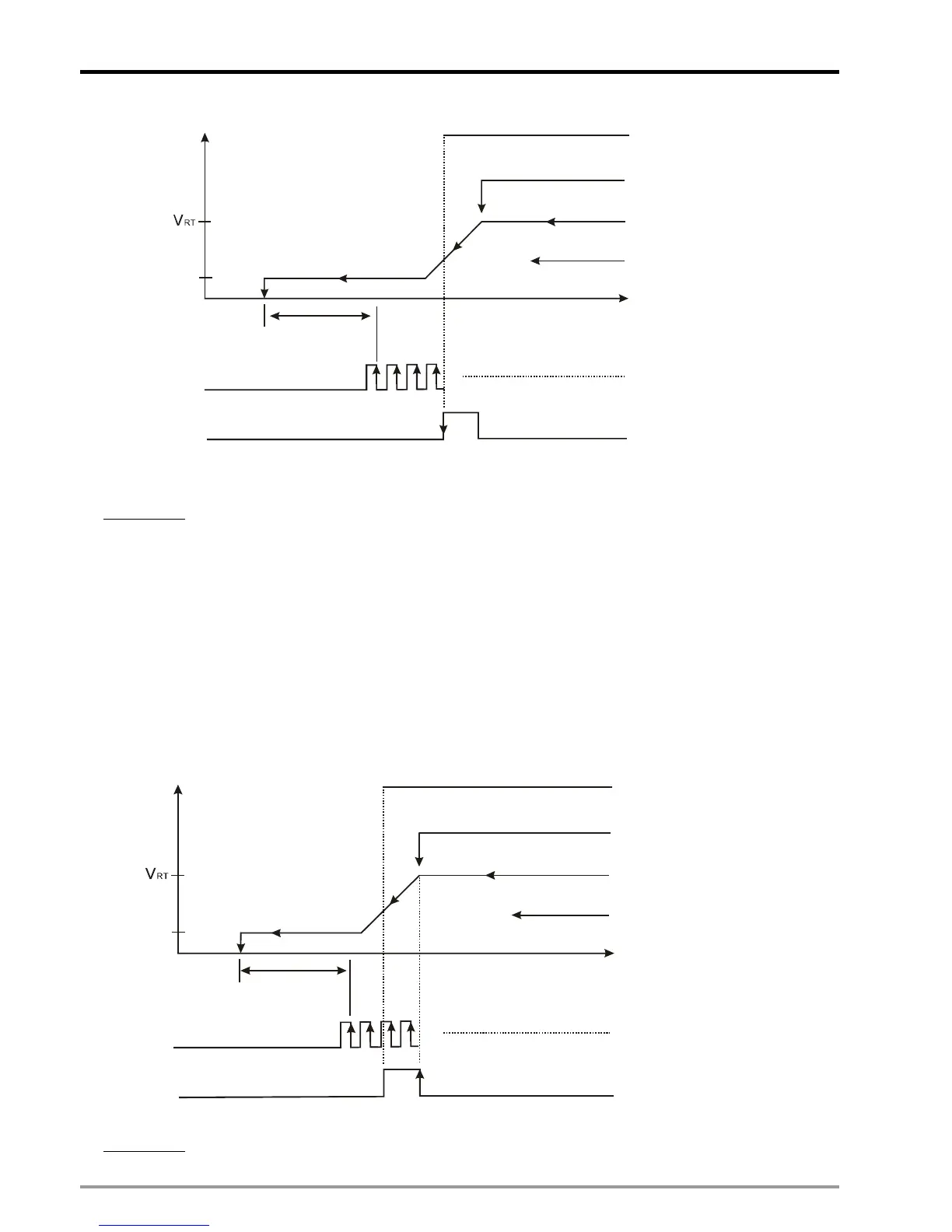
y b[9:10] = 01
: normal mode; DOG signal rising-edge triggered
1. Zero return: The motor operates at zero return speed V
RT
. When it encounters DOG signal, it will decelerate to
zero return deceleration speed V
CR
. At the same time, rising edge of DOG signal is triggered to enable the
specified PG0 signals (N) plus the specified pulse signals (P). After both N signal and P pulses are finished, the
motor stops.
2. If the specified N or P is too small, when the rising edge of DOG signal is triggered, the motor will stop
immediately after the specified PG0 signals (N) plus the specified pulse signals (P), even if the zero return
deceleration speed (V
CR
) is not yet reached.
3. If N and P are both set as “0”, the motor will stop immediately when the rising-edge of DOG signal is triggered.
DOG
V
CR
V
CR
Away from DOG signal
DOG signal detected
Zero return direction
Speed (PPS)
Number of P 0 signals (N)
in zero return
G
Number of pulses (P)
in zero return
DOG signal rising -edge triggered
y b[9:10] = 10
: overwrite mode; DOG signal falling-edge triggered
1. Zero return: The motor operates at zero return speed V
RT
. When it encounters DOG signal, it will decelerate to
 Loading...
Loading...











