3 Functions of Devices in DVP-PM
DVP-PM Application Manual
3-64
b11 of D1816 (D1896, D1976, D2056): Reverse the displacement direction in same pulse output polarity
b[11] = 0: CP value increases when in forward running; CP value decreases when in reverse running
b[11] = 1: CP value decreases when in forward running; CP value increases when in reverse running
b12 of D1816 (D1896, D1976, D2056): absolute/relative positioning setting
b[12] = 0: absolute positioning
b[12] = 1: relative positioning
b13 of D1816 (D1896, D1976, D2056): DOG signal rising/falling edge triggered
(For single-speed positioning interruption and 2-speed positioning interruption)
b[13] = 0: DOG signal rising-edge triggered
b[13] = 1: DOG signal falling-edge triggered
b14 of D1816 (D1896, D1976, D2056): acceleration/deceleration curve selection
b[14] = 0: trapezoid curve
b[14] = 1: S curve
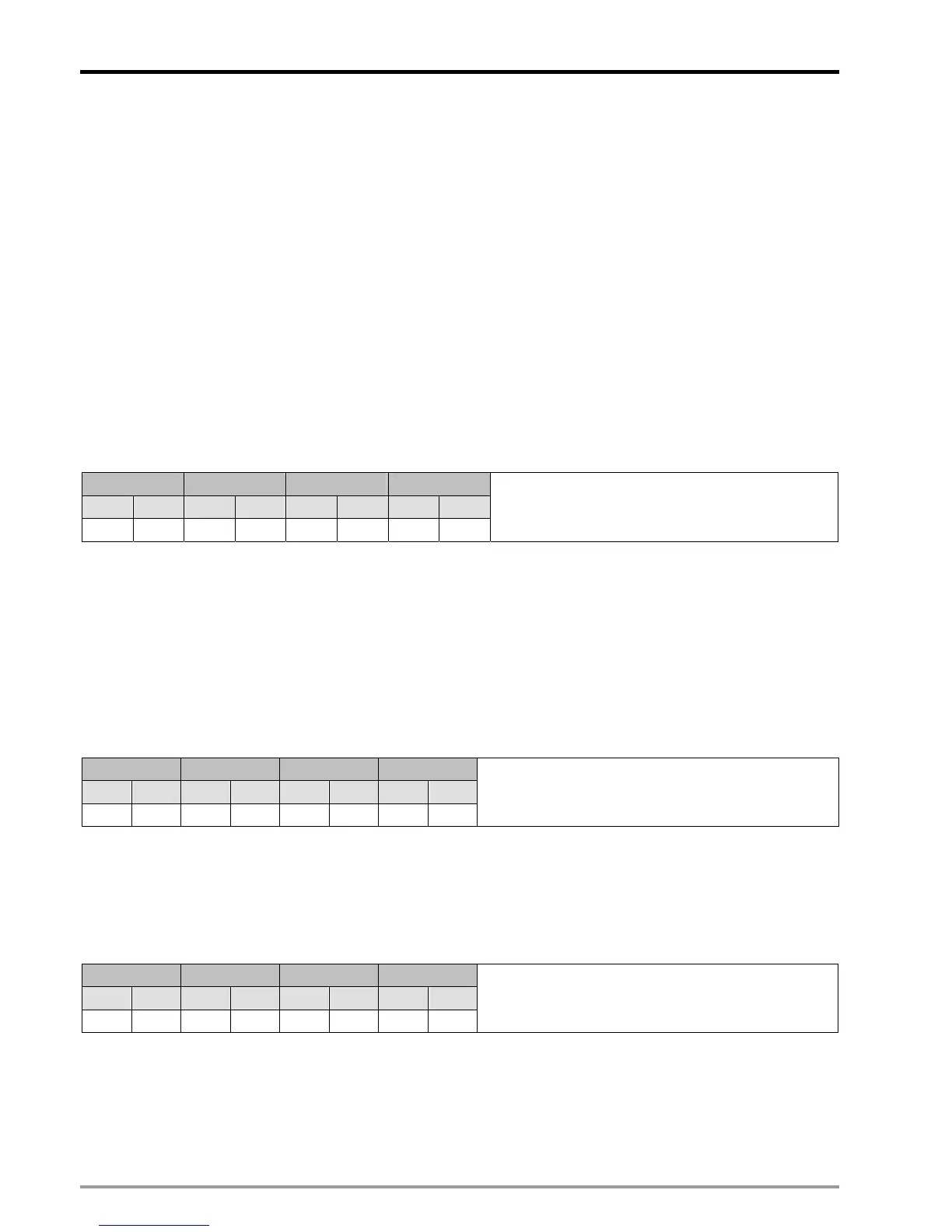
X axis Y axis Z axis A axis
HW LW HW LW HW LW HW LW
D1819 D1818 D1899 D1898 D1979 D1978 D2059 D2058
Pulses Per Revolution (PPR) (A)
1. Users can set up electronic gear ratio for general servo drives. Therefore, the pulses per relolution (A) set up in
PLC may not equal to the actual pulses generated by the encoder for servo motor.
PPR(A) × electronic gear ratio (CMX/CDV) = PPR generated by encoder
2. The system unit varies according to the settings of b0 and b1 in D1816 (D1896, D1976, D2056). Parameter (A) is
valid only when the system unit is set to be machine unit or combined unit. Parameter A is invalid when the
system unit is set as motor unit.
X axis Y axis Z axis A axis
HW LW HW LW HW LW HW LW
D1821 D1820 D1901 D1900 D1981 D1980 D2061 D2060
Displacement Per Revolution (DPR) (B)
1. The system unit varies according to the settings of b0 and b1 in D1816 (D1896, D1976). There are three units
available for displacement per revolution. Valid range: 1 ~ +2,147,483,647 (um/Rev, mdeg/Rev, 10
-4
inch/Rev)
2. Parameter (B) is valid only when the system unit is set to be machine unit or combined unit. Parameter (B) is
invalid when the system unit is set as motor unit.
X axis Y axis Z axis A axis
HW LW HW LW HW LW HW LW
D1823 D1822 D1903 D1902 D1983 D1982 D2063 D2062
Maximum Speed (V
MAX
)
1. V
MAX
is the maximum speed for all kinds of operation modes. Range: 0 ~ +2,147,483,647; the unit is set by b0
and b1 of D1816 (D1896, D1976, D2056).
2.
V
MAX
should be specified within the valid speed range of motion instructions: 10 ~ 500kPPS. If the value is bigger
than 500k, the output will be set as 500k; if the value is smaller than 10, the output will be set as 10.
 Loading...
Loading...











