3 Functions of Devices in DVP-PM
DVP-PM Application Manual
3-65
X axis Y axis Z axis A axis
HW LW HW LW HW LW HW LW
D1825 D1824 D1905 D1904 D1985 D1984 D2065 D2064
Bias Speed (V
BIAS
)
1. V
BIAS
is the start speed for pulse output. Range: 0 ~ +2,147,483,647; the unit is set by b0 and b1 of D1816
(D1896, D1976, D2056).
2.
V
BIAS
should be specified within the valid bias speed range of motion instructions: 0 ~ 500kPPS. If the value is
bigger than 500k, the output will be set as 500k; if the value is smaller than 0, the output will be set as 0.
3. If you apply a step drive system, please pay attention to the resonance frequency of the step motor. Set the bias
speed higher than the resonance frequency for a safe startup.
X axis Y axis Z axis A axis
HW LW HW LW HW LW HW LW
D1827 D1826 D1907 D1906 D1987 D1986 D2067 D2066
JOG Speed (V
JOG
)
1. Range: 0 ~ +2,147,483,647; the unit is set by b0 and b1 of D1816 (D1896, D1976, D2056).
2.
V
JOG
should be specified within the valid speed range of motion instructions: 10 ~ 500kPPS. If the value is bigger
than 500k, the output will be set as 500k; if the value is smaller than 10, the output will be set as 10.
3. Setup range limitation: V
MAX
> V
JOG
> V
BIAS
. If V
JOG
> V
MAX
, set value of V
JOG
will be same as V
MAX
. If V
JOG
< V
BIAS
,
set value of V
JOG
will be same as V
BIAS
.
4. V
JOG
cannot be modified during the execution.
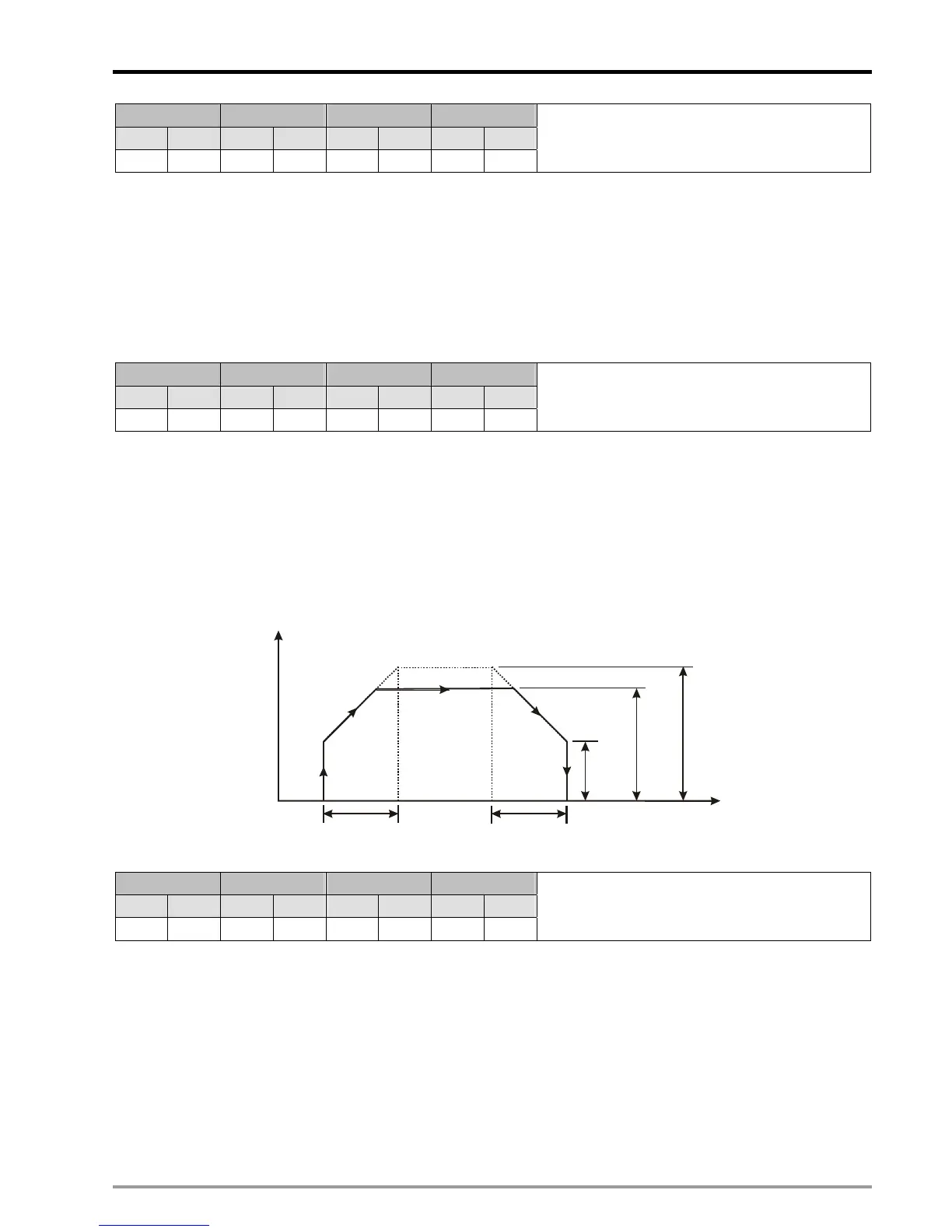
V
BIAS
V
JOG
V
MAX
T
A
T
D
Speed
X axis Y axis Z axis A axis
HW LW HW LW HW LW HW LW
D1829 D1828 D1909 D1908 D1989 D1988 D2069 D2068
Zero Return Speed V
RT
1. V
RT
is the speed for returning to mechanical zero point. Range: 0 ~ +2,147,483,647; the unit is set by b0 and b1
of D1816 (D1896, D1976, D2056).
2.
V
RT
should be specified within the valid speed range of motion instructions: 10 ~ 500kPPS. If the value is bigger
than 500k, the output will be set as 500k; if the value is smaller than 10, the output will be set as 10.
3. Setup range limitation: V
MAX
> V
RT
> V
BIAS
4. V
RT
cannot be modified during the execution.
 Loading...
Loading...











