3 Functions of Devices in DVP-PM
DVP-PM Application Manual
3-72
Speed
T
ACC
T
DEC
V
MAX
Time
V
BIAS
Start
V(I)
P(I)
DOG
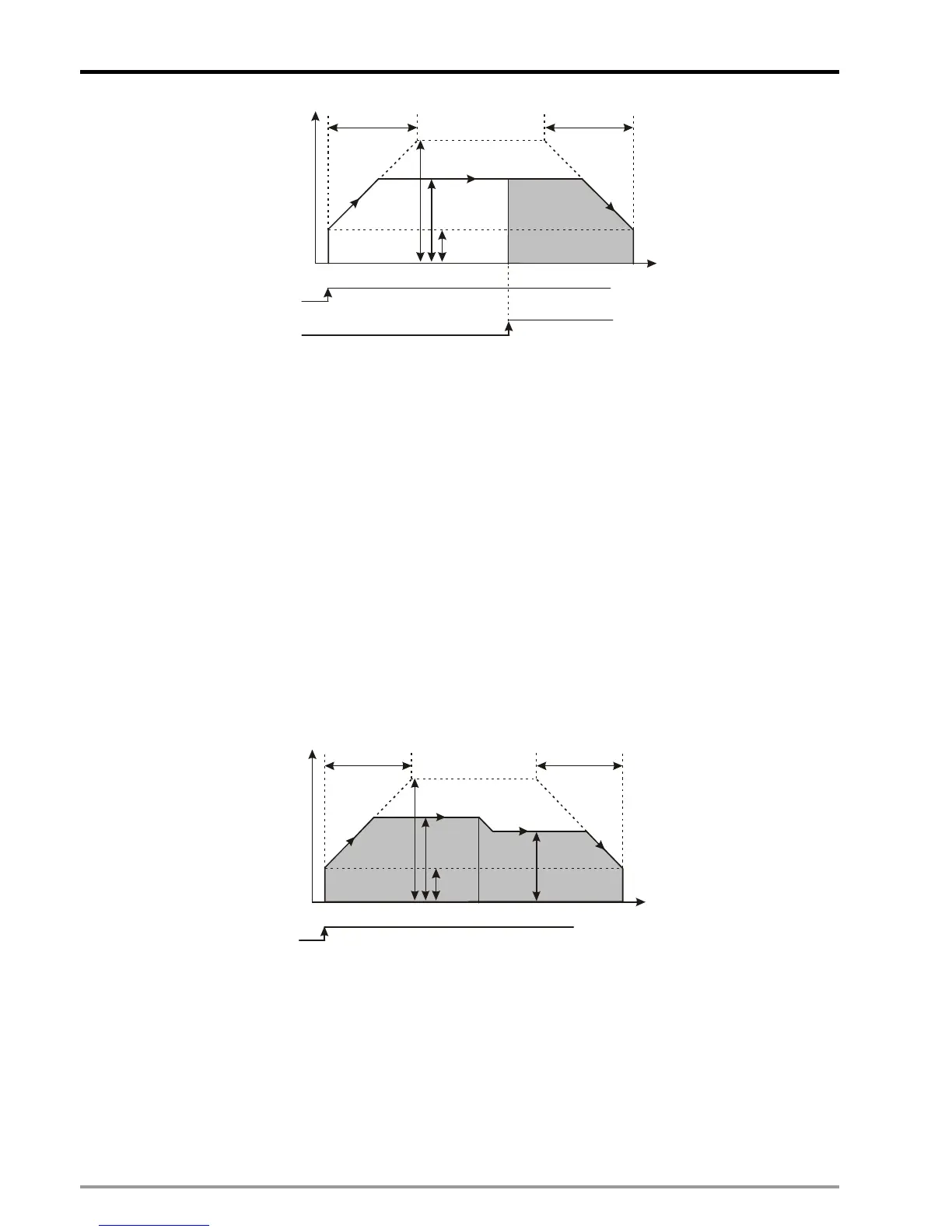
11. b10 of D1846 (D1926, D2006, D2086): enabling 2-speed positioning
♦ When b[10] is triggered and START = ON, the 2-speed positioning mode will be started. The 2
nd
-speed
positioning will start immediately after the 1
st
-speed positioning reaches P(I).
♦ Operation direction: Direction of relative positioning is determined by the sign bit of the value for P(I) (set in
D1838, D1918, D1998, D2078). Direction of absolute positioning is determined by current position (CP).
Forward running occurs when P(I) is bigger than CP. Reverse running occurs when P(I) is smaller than CP.
♦ The operation speed will be stable after the speed is accelerated from
V
BIAS
to the expected V(I). When P(I)
is reached, V(I) will accelerate/decelerate to V(II) and operates in stable speed. Also, when it is approaching
P(II) value set in the register, the positioning will start to decelerate to V
BIAS
and stop. There are P(I)+P(II)
pulses generated during the positioning
♦ The registers involved: D1824 (D1904, D1984, D2054) (V
BIAS
), D1840 (D1920, D2000, D2080) (V(I)), D1844
(D1924, D2004, D2084) (V(II)), D1822 (D1902, D1982, D2062) (V
MAX
), D1838 (D1918, D1998, D2078)
(P(I)), D1842 (D1922, D2002, D2082) (P(II), D1836 (D1916, D1996, D2076) (T
ACC
) and D1837 (D1917,
D1997, D2077) (T
DEC
).
Speed
T
ACC
T
DEC
V
MAX
Time
V
BIAS
Start
V(I) V(II)P(II)
P(I)
12. b11 of D1846 (D1926, D2006, D2086): enabling 2-speed positioning interruption
♦ When b[11] is triggered and START = ON, the 2-speed positioning interruption mode will be started. The 2
nd
-speed positioning will start immediately when DOG sensor is detected during the 1
st
-speed positioning
process.
♦ Operation direction: Direction of relative positioning is determined by the sign bit of the value for P(I) (set in
D1838, D1918, D1998, D2078). Direction of absolute positioning is determined by current position (CP).
Forward running occurs when P(I) is bigger than CP. Reverse running occurs when P(I) is smaller than CP.
♦ The operation speed will be stable after the speed is accelerated from
V
BIAS
to the expected V(I). When
 Loading...
Loading...











