3 Functions of Devices in DVP-PM
DVP-PM Application Manual
3-73
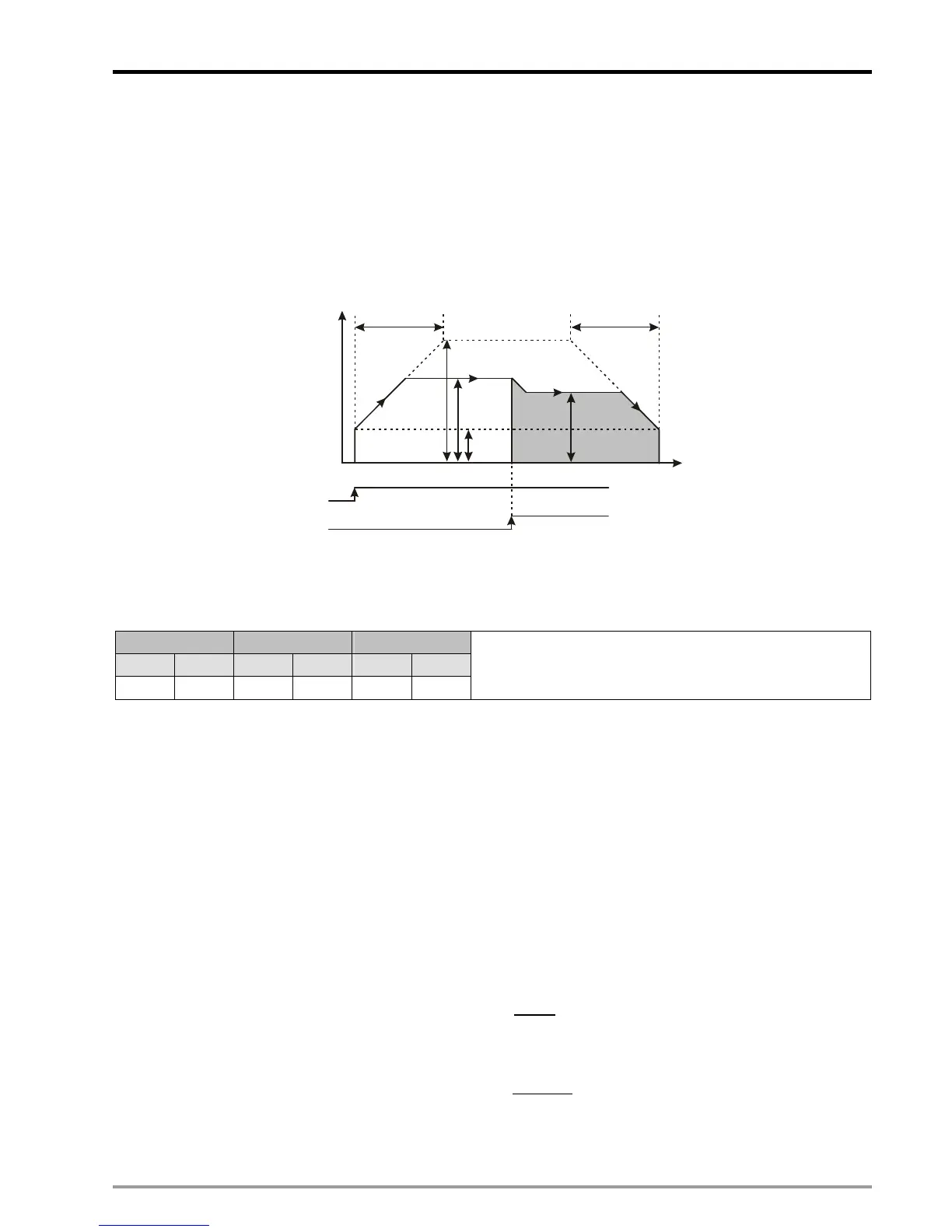
DOG sensor is detected during the 1
st
-speed positioning process, the 2
nd
-speed positioning will start
immediately to accelerate/decelerate to V(II) and operates in stable speed. Pulse output can be stopped by
the input signal from external STOP terminal.
♦ The registers involved: D1824 (D1904, D1984, D2054) (V
BIAS
), D1840 (D1920, D2000, D2080) (V(I)), D1844
(D1924, D2004, D2084) (V(II)), D1822 (D1902, D1982, D2062) (V
MAX
), D1838 (D1918, D1998, D2078)
(P(I)), D1842 (D1922, D2002, D2082) (P(II), D1836 (D1916, D1996, D2076) (T
ACC
) and D1837 (D1917,
D1997, D2077) (T
DEC
).
Speed
T
ACC
DEC
V
MAX
Time
V
BIAS
Start
V(I) V(II)P(II)
DOG
13. b12 of D1846 (D1926, D2006): enabling OX subroutine
♦ b[12] = 1: start OX subroutine; b[12] = 0: stop OX subroutine
X axis Y axis Z axis
HW LW HW LW HW LW
D1847 D1927 D2007
Work Modes
1. b2 of D1847 (D1927, D2007): CLR signal output mode
♦ b[2] = 0: CLR will output 130ms signal to the servo as the clear signal when zero return is completed,
♦ b[2] = 1:
CLR will be a general output point, and its status will be controlled by ON/OFF status of b[3].
2. b3 of D1847 (D1927, D2007): CLR output ON/OFF control
♦ b[3] = 0: output point CLR will be OFF.
♦ b[3] = 1: output point CLR will be ON.
3. b4 of D1847 (D1927, D2007): CLR polarity setting
♦ b[4] = 0: CLR is NO contact.
♦ b[4] = 1: CLR is NC contact.
4. b5 of D1847 (D1927, D2007): STOP mode setting
♦ b[5] = 0: When STOP signal comes in during the motor execution, the motor will decelerate to stop. When
the next motion instruction is activated, the motor will ignore
the unfinished distance and immediately
execute the next positioning step.
♦ b[5] = 1: When STOP signal comes in during the motor execution, the motor will decelerate to stop. When
the next motion instruction is activated, the motor will complete
the unfinished distance before executing the
next positioning step.
5. b6 of D1847 (D1927, D2007): range for MPG
♦ b[6] = 0: No limitation on the range of MPG pulse output
 Loading...
Loading...











