3 Functions of Devices in DVP-PM
DVP-PM Application Manual
3-74
♦ b[6] = 1: The range for MPG pulse output is limited within P(I) and P(II). When the range is exceeded, the
pulse output will decelerate to stop.
6. b7 of D1847 (D1927, D2007): LSP/LSN stop mode
♦ b[7] = 0: During the running of motor, the motor decelerates to stop when encountering LSP/LSN signal
input.
♦ b[7] = 1: During the running of motor, the motor stops immediately when encountering LSP/LSN signal input.
7. b8 ~ b10 of D1847 (D1927, D2007): MASK(Stop) settings
♦ MASK settings include single-speed positioning, 2-speed positioning, single-speed positioning interruption
and 2-speed positioning interruption.
♦ b[10~8] = K1 (001):
Triggering MASK by the rising edge of input signal on terminal ΦA±.
b[10~8] = K2 (010): Triggering MASK by the falling edge of input signal on terminal ΦA±.
b[10~8] = K3 (011):
Triggering MASK by the rising edge of input signal on terminal ΦB±.
b[10~8] = K4 (100): Triggering MASK by the falling edge of input signal on terminal ΦB±.
8. b15 of D1847 (D1927, D2007): returning to default setting
♦ b[15] = 1: Return all parameters to default settings.
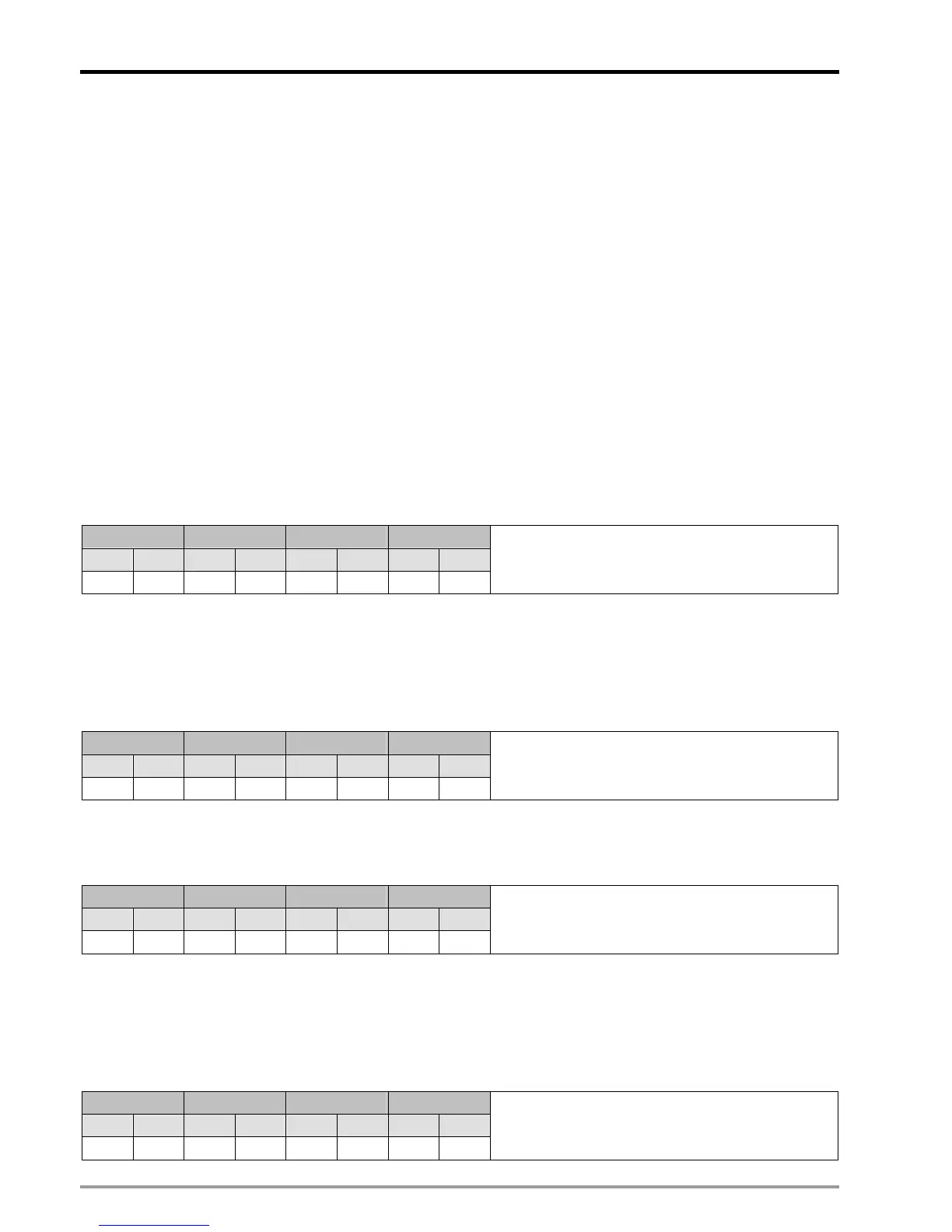
X axis Y axis Z axis A axis
HW LW HW LW HW LW HW LW
D1849 D1848 D1929 D1928 D2009 D2008 D2089 D2088
Current Position (CP) (pulse)
1. Range: -2,147,483,648 ~ +2,147,483,647
2. Current position (motor unit: pulse). The unit setting can be modified by b0 and b1 of D1816 (D1896, D1976).
When zero return is completed, current position registers will be updated by the definition of zero point (HP)
(D1834 D1914, D1994)
X axis Y axis Z axis A axis
HW LW HW LW HW LW HW LW
D1851 D1850 D1931 D1930 D2011 D2010 D2091 D2090
Current Speed (CS) (pps)
1. Range: 0 ~ +2,147,483,647
2. Unit: pulse/sec (PPS)
X axis Y axis Z axis A axis
HW LW HW LW HW LW HW LW
D1853 D1852 D1933 D1932 D2013 D2012 D2093 D2092
Current Position (CP) (unit)
1. Range: -2,147,483,648 ~ +2,147,483,647
2. Current position (combined unit / machine unit). The unit setting can be modified by b0 and b1 of D1816 (D1896,
D1976). When zero return is completed, current position registers will be updated by the definition of zero point
(HP) (D1834 D1914, D1994).
X axis Y axis Z axis A axis
HW LW HW LW HW LW HW LW
D1855 D1854 D1935 D1934 D2015 D2014 D2095 D2094
Current Speed (CS) (unit)
 Loading...
Loading...











