(x, y, z)
Target point
(x, y)
Z=0
Starting point
Z=0
Starting point
Center
Center
R (radius)
R (radius)
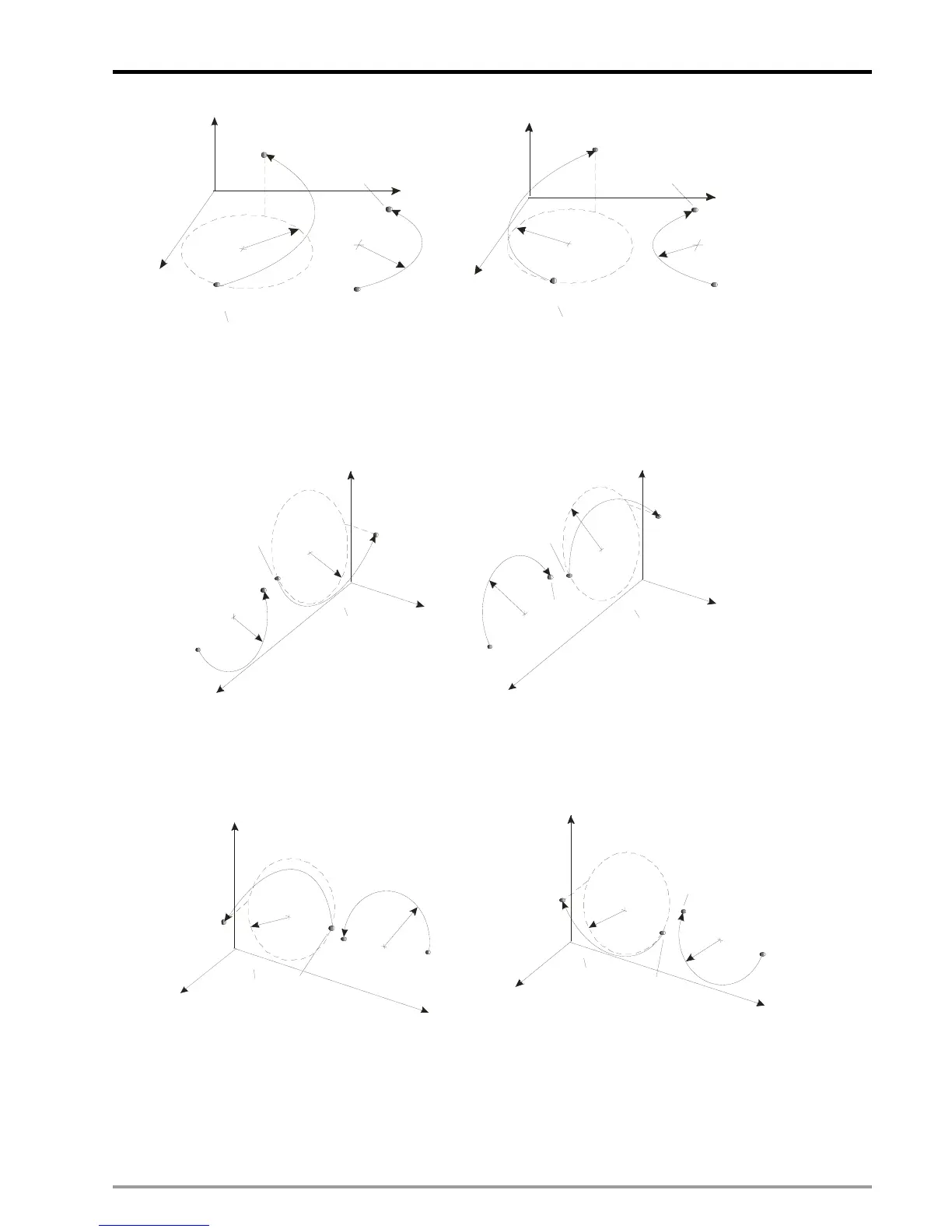
8. The figure below illustrates the moving paths of the helical interpolation with and without the value on Y-axis.
(G18 mode, X-Z plane).
X
Y
Z
Y=0
Y=0
X
Y
Z
Y=0
Y=0
CCW (Counterclockwise)
CW (Clockwise)
Target point
(x, y, z)
Starting
point
Target point
(x, z)
Center
Center
Starting
point
R (radius)
R (radius)
Target point
(x, y, z)
Starting
point
Starting
point
Ta r ge t po in t
(x, z)
Center
Center
R (radius)
R (radius)
9. The figure below illustrates the moving paths of the helical interpolation with and without the value on X-axis.
(G19 mode, Y-Z plane)
X
Y
Z
X=0
X=0
X
Y
Z
X=0
X=0
CCW (Counterclockwise)
CW (Clockwise)
Target point
(x, y, z)
Center
R (radius)
R (radius)
Starting
point
Starting
point
Center
Tar get
point
(y, z)
Target point
(x, y, z)
Center
Center
Starting
point
Tar ge t poi nt
(y, z)
Starting
point
R (radius)
R (radius)
.
10. 16-bit devices and 32-bit devices can be used together.
11. Programming rule: (1) Target position and radius is a must while the moving speed is not; (2) If the coordinate of
X/Y/Z axis of target position is the same with that of current position, the same X/Y/Z value could be left out
12. If you set up the target position on the axis without setting up the moving speed, the operation will run at V
MAX
 Loading...
Loading...











