6 Motion Instructions & G-Code Instructions
DVP-PM Application Manual
6-38
MON Mnemonic Operands Function
19
SETT
X P
1
Y P
2
Z P
3
Set up Current Position
Controllers
20PM -
Bit Devices Double-Word Devices Notes
Type
K H D KK HH DD
P
1
* * * * * *
P
2
* * * * * *
P
3
* * * * * *
SETT instruction supports V, Z index register
modification on the devices.
See specifications of DVP-PM for the applicable
range of each device.
You can place an M-Code instruction after SETT.
Operands:
P
1
: Current position on X axis P
2
: Current position on Y axis P
3
: Current position on Z axis
Explanations:
1. When SETT instruction is executed, the current position set in SETT instruction will be written automatically into
current position registers: D1848 ~ D1849 for X axis; D1928 ~ D1929 for Y axis and D2008~D2009 for Z axis.
2. Range of parameters: (16-bit) K = -32,768 ~ 32,767; H = 0 ~ FFFF; D = 0 ~ 9,999; (32-bit) KK = -2,147,483,648
~ 2,147,483,647; HH = 0 ~ FFFFFFFF; DD = 0 ~ 9,998.
3. The 16-bit devices and 32-bit devices can be used together.
4. Due to that current position is changed when SETT instruction is executed, the mechanical zero point and
electrical zero point will also be changed.
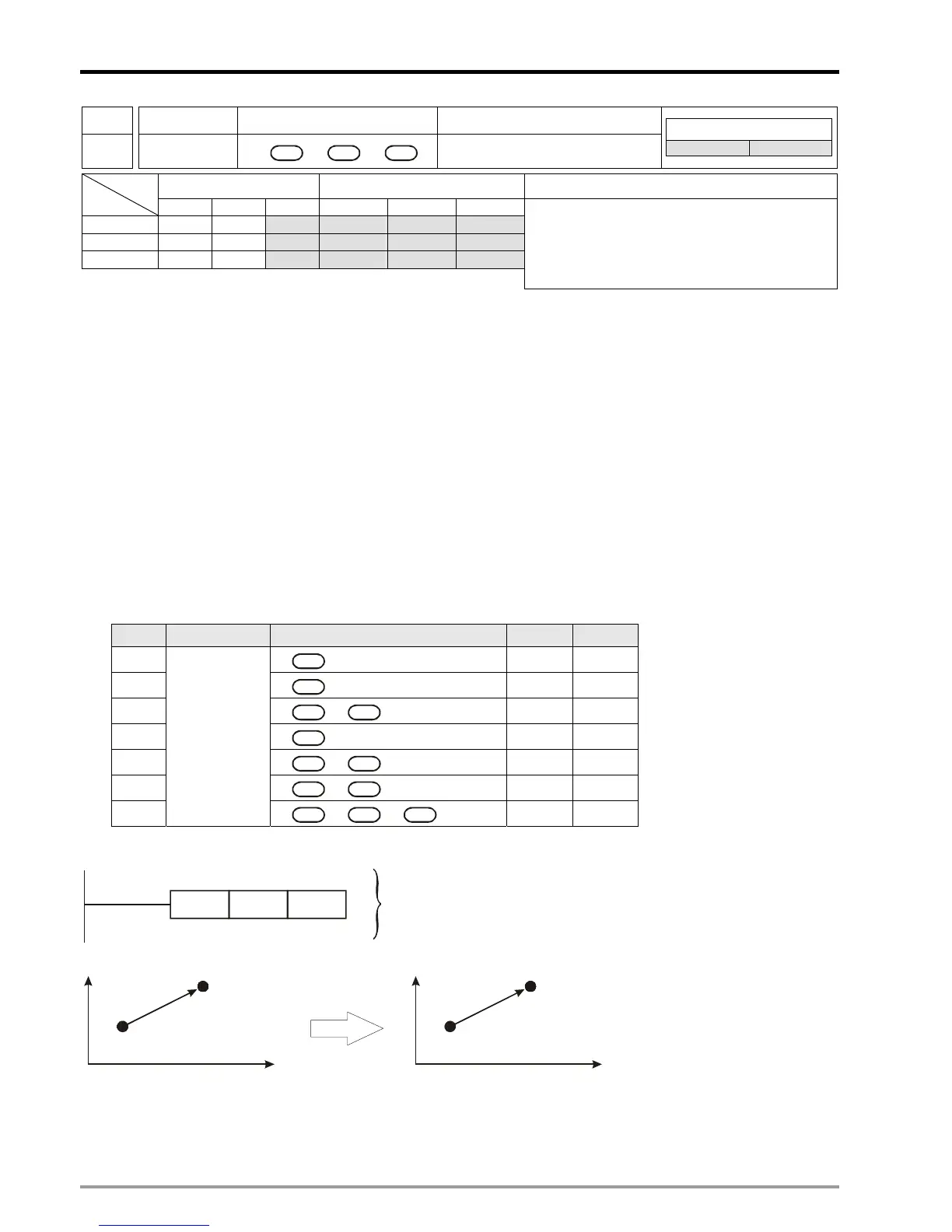
5. At least one current position on one axis should be specified, therefore there are 7 operand combinations for
SETT instruction.
NO. Instruction Operand combination 20D 20M
1
X P
1
9 9
2

 Loading...
Loading...










