9 Electrical CAM
DVP-PM Application Manual
9-31
equally divided by the drop times of cutter)
b[2]=1: Specify the number of data points in sync area
b[3]=1: Borrow the data setting of previous E-CAM
b[4]=1: Non-smooth acceleration/deceleration for
fixing the resoulution.
P2
Pulses per round of
Master
Integer Unit: Pulse
P3
Length per round of
Master
Integer Unit: mm
P4
Pulses per round of
Slave
Floating
point
Unit: Pulse
P5
Length per round of
Slave
Floating
point
Unit: mm
P6
Sync start angle of
Slave
Integer Set range: 180~360 degree
P7
Sync end angle of
Slave
Integer Set range: 180~360 degree
P8
Length of cutting
process on Master
Integer Unit: mm
P9
Number of cutters
on Slave
Integer Number of cutters applied in rotary cut application
P10
Length of Master
before sync area
Integer
When P1 is set as 1, the parameter sets the length of
Master before sync area.
P11
Angle between
start position and
sync start: angle θ
1
(degree)
Integer
When P1 is set as 1, the parameter sets the angle
before Sync Start.
P12
Number of data
points in sync area
Integer
When b[2] of P1 is 1, the parameter sets the number
of data points in sync area.
For detailed explanation of creating thick material cutting E-CAM curves, please refer to 9.4.2.4.
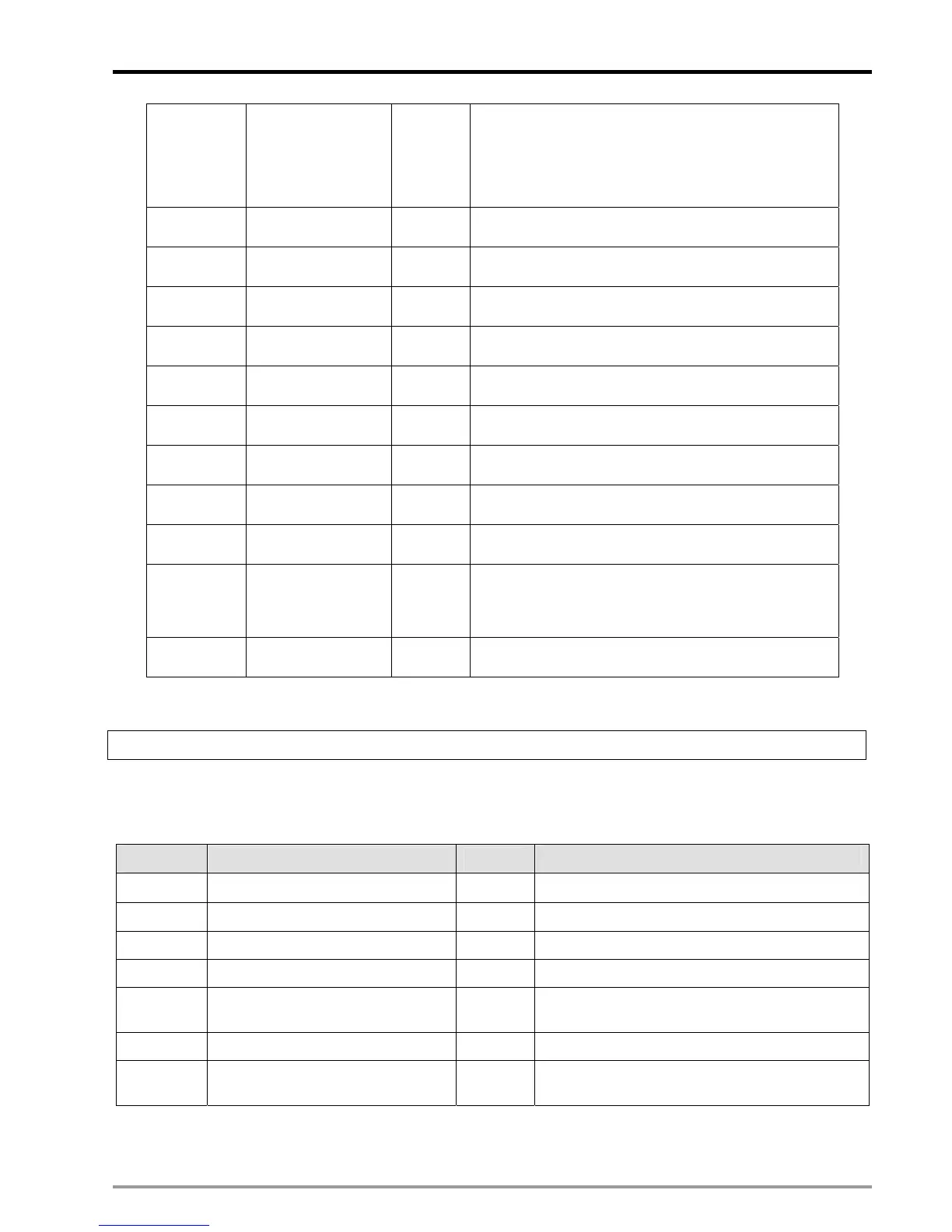
CR#10001:
Read E-CAM status
[Explanations]
The function is used to read current E-CAM status when E-CAM is executing. Only DFROM instruction is
applicable for this function. The read data will be as follows:
Parameters Data Format
Explanations
P1 Current position of Master
Integer
Reset at DOG signal
P2 Length of Master 1 Integer DOG signal to DOG signal
P3 Current E-CAM curve Integer
P4 Current position of Slave Integer Updated at DOG signal
P5 Error of Slave
Integer
Error between DOG signal and the end point of
CAM cycle.
P6 Length of Master 2 Integer START0/PG0 signal to START0/PG0 signal
P7 Error of Master
Integer
Error between START0, PG0 signal and the end
point of CAM cycle
The function of reading E-CAM status can be applied in offset compensation to Slave error. For the methods of
Slave error compensation, please refer to 9.4.2.5.

 Loading...
Loading...










