3 Functions of Devices in DVP-PM
DVP-PM Application Manual
3-51
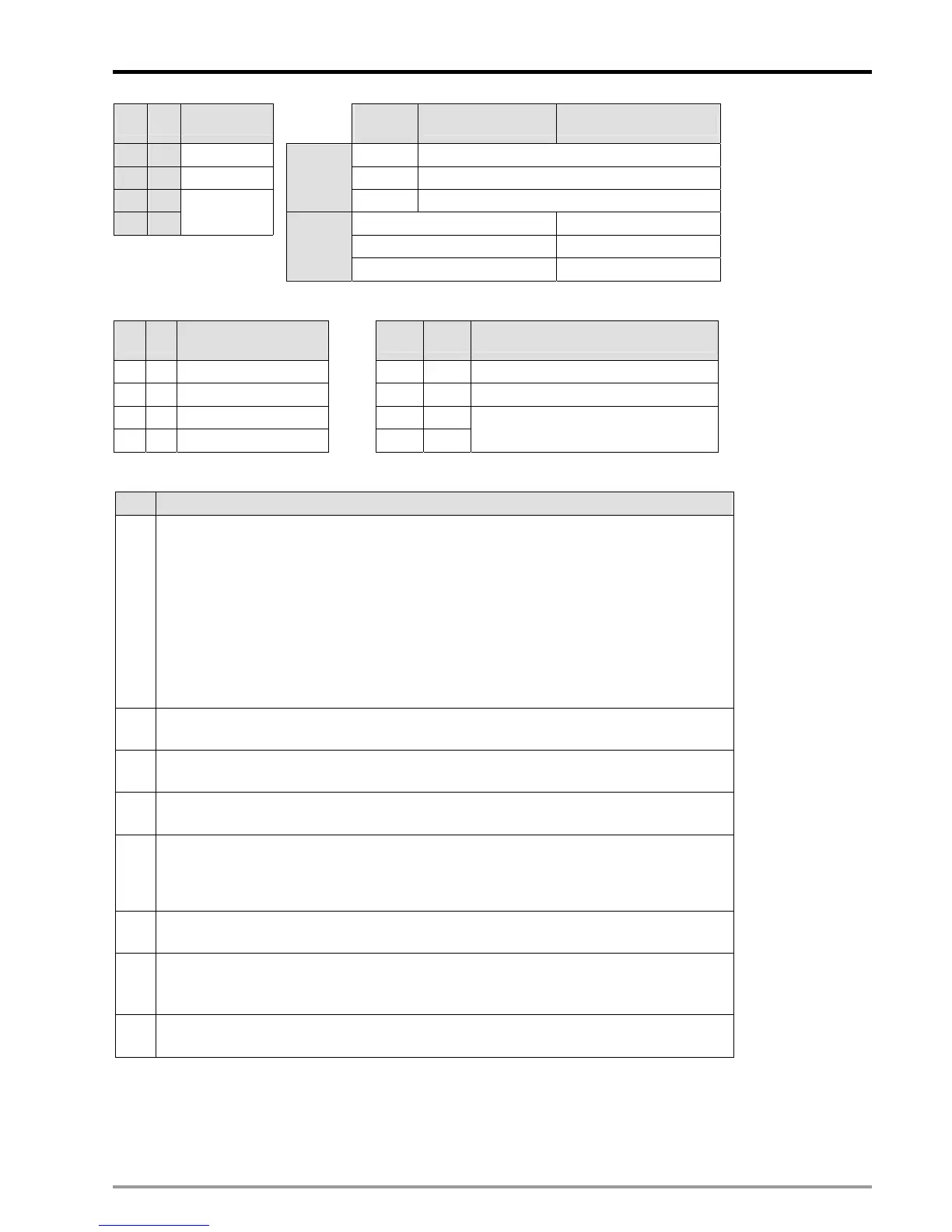
b1 b0 Unit
Motor
unit
Combined unit Machine unit
0 0 Motor pulse um
0 1 Machine pulse m deg
1 0
Position
pulse 10
-4
inch
1 1
Combined
pulse/sec cm/min
pulse/sec 10deg/min
Speed
pulse/sec inch/min
Note *2: Note *3:
b3 b2
Multiplication of
position data
b5 b4 Description
0 0 10
0
0 0 Forward pulse + reverse pulse
0 1 10
1
0 1 Pulse + direction
1 0 10
2
1 0
1 1 10
3
1 1
A/B phase pulse
Note *4:
bit# Explanation
6
b[6]=1: Enable PWM mode
(1) When the operation command “JOG+ operation” is enabled, PWM will be
executed on Y0~Y3.
(2) When the operation command “single speed positioning” is enabled, single
speed positioning will be executed on Y0~Y3 with single-phase pulses.
(3) PWM pulse width setting: D1838, D1918, D1998, D2078
(4) PWM cycle setting: D1842, D1922, D2002, D2082
8
b[8]=0: Zero return executes in positive direction, i.e. current position(CP) increases
b[8]=1: Zero return executes in negative direction, i.e. current position(CP) decreases
9
b[9]=0: normal mode
b[9]=1: overwrite mode
10
b[10]=0: DOG signal falling edge triggered
b[10]=1: DOG signal rising edge triggered
11
b[11]=0: CP value increases when in forward running; decreases when in reverse
running
b[11]=1: CP value decreases when in forward running; increases when in reverse
running
12
b[12]=0: Absolute positioning
b[12]=1: Relative positioning
13
b[13]=0: DOG signal rising edge triggered
b[13]=1: DOG signal falling edge triggered
(Valid for single-speed / 2-speed positioning interruption mode)
14
b[14]=0: Trapezoid curve
b[14]=1: S curve
Function Group:
Setting up Acyclic E-CAM
Number:
D1832, D1833, D1834 (not supported by 10PM)
 Loading...
Loading...











