3 Functions of Devices in DVP-PM
DVP-PM Application Manual
3-54
1 - 9
2 CLR signal output mode 10
3 CLR output ON/OFF control 11
4 CLR polarity setting 12
01: Insert CAM data in multiple axes
10: Table-Output setting of CAM
control
5 STOP mode setting 13
-
6 Range for MPG 14
-
7 LSP/LSN stop mode 15 Returning to default setting
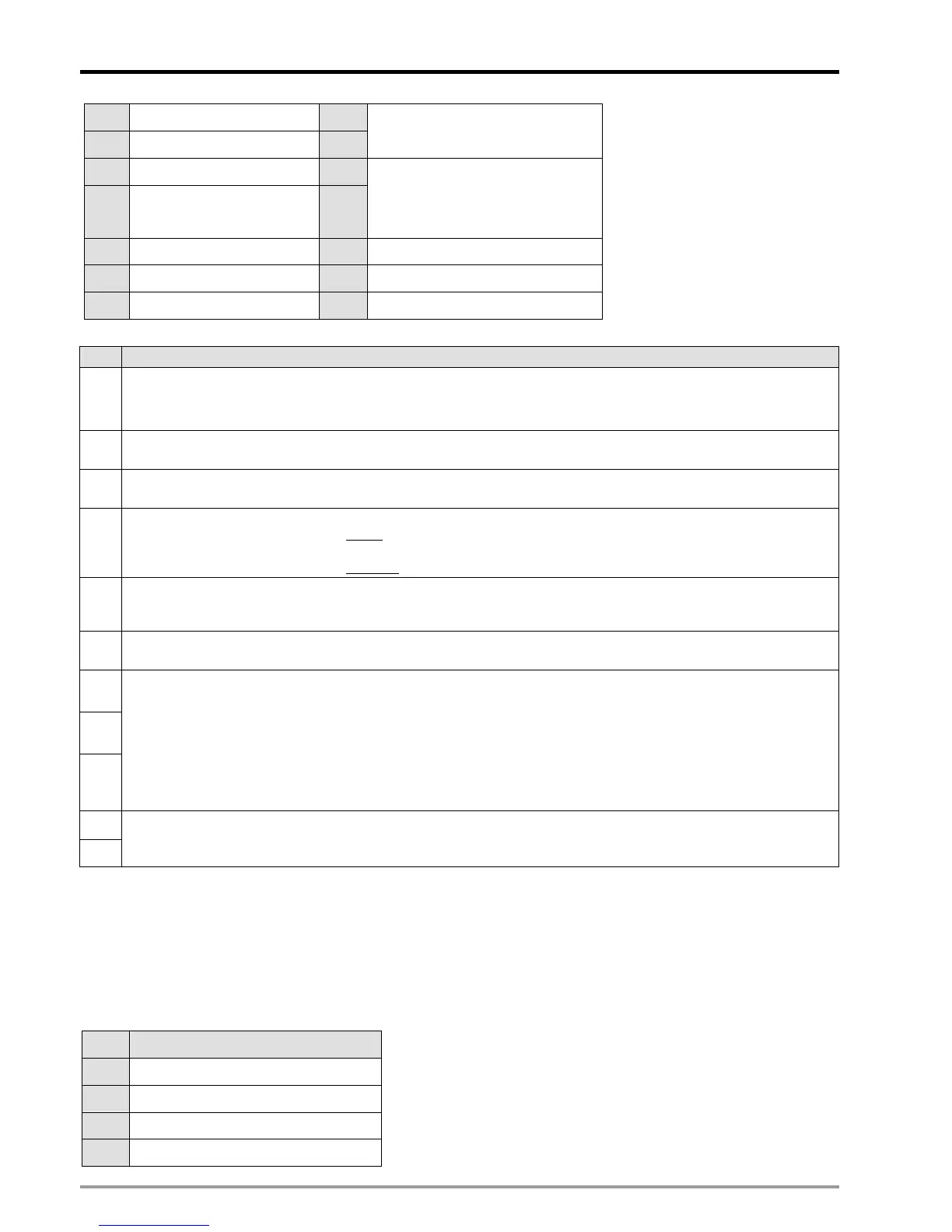
bit# Explanation
2
When b[2] = 0, CLR will output 130ms signal to the servo as the clear signal when zero return is completed.
When b[2] = 1, CLR will be a general output point, and its status will be controlled by ON/OFF status of b[3].
3
When b[3] = 0, output point CLR will be OFF.
When b[3] = 1, output point CLR will be ON.
4
b[4] = 0: CLR is NO contact.
b[4] = 1: CLR is NC contact.
5
b[5] = 0: When STOP signal comes in during the motor execution, the motor will decelerate to stop. When the next motion
instruction is activated, the motor will ignore
the unfinished distance and immediately execute the next positioning step.
b[5] = 1: When STOP signal comes in during the motor execution, the motor will decelerate to stop. When the next motion
instruction is activated, the motor will complete the unfinished distance before executing the next positioning step.
6
b[6] = 0: No limitation on the range of MPG pulse output
b[6] = 1: The range for MPG pulse output is limited within P(I) and P(II). When the range is exceeded, the pulse output will
decelerate to stop.
7
b[7] = 0: During the running of motor, the motor decelerates to stop when encountering LSP/LSN signal input
b[7] = 1: During the running of motor, the motor stops immediately when encountering LSP/LSN signal input.
8
9
10
MASK(Stop) settings (single-speed positioning, 2-speed positioning, single-speed positioning interruption, 2-speed
positioning interruption)
b[10~8] = K0 (000) or other values: MASK function disabled.
b[10~8] = K1 (001): Triggering MASK by the rising edge of input signal on terminal ΦA±
b[10~8] = K2 (010): Triggering MASK by the falling edge of input signal on terminal ΦA±
b[10~8] = K3 (011): Triggering MASK by the rising edge of input signal on terminal ΦB±
b[10~8] = K4 (100): Triggering MASK by the falling edge of input signal on terminal ΦB±
(Enable the trigger signal of ΦA± or ΦB± as the stop signal when using a MPG)
11
12
b[12~11]=K1 (01) : Insert CAM data in multiple axes
b[12~11]=K2 (10) : Table-Output setting of CAM control
Function Group:
Execution Status of X-Y-Z Axis
Number:
D1856, D1936, D2016, D2096
Explanations:
Execution status of X axis: D1856, Y axis: D1936 and Z axis: D2016..
bit# Execution status of X-Y-Z
0 Forward pulse output in progress
1 Reverse pulse output in progress
2 Operation in progress
3 Error occurs
 Loading...
Loading...











