Chapter 12 Description of Parameter Settings
ME300
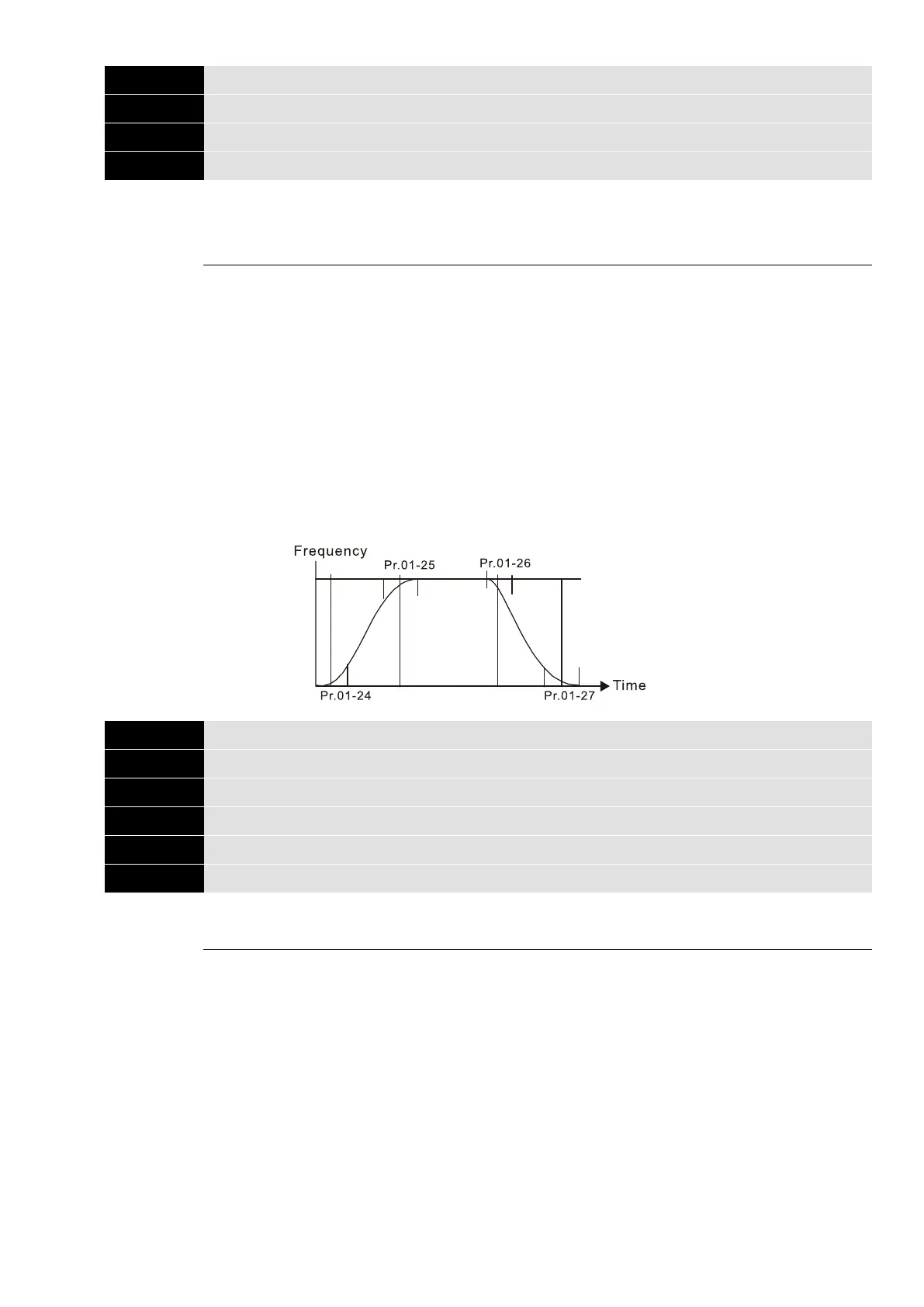
S-curve for Acceleration Begin Time 1
S-curve for Acceleration Arrival Time 2
S-curve for Deceleration Begin Time 1
S-curve for Deceleration Arrival Time 2
Default: 0.20
Settings Pr.01-45 = 0: 0.00–25.00 sec.
Pr.01-45 = 1: 0.0–250.0 sec.
Sets a slow start when the drive begins to accelerate at the start. The acceleration and
deceleration curve adjust the S-curve acceleration and deceleration according to the parameter
value. When you enable this function, the drive has a different acceleration and deceleration
curve based on the acceleration and deceleration time.
The S-curve function is disabled when you set the acceleration and deceleration time to 0.
When Pr.01-12, 01-14, 01-16, 01-18 ≥ Pr.01-24 and Pr.01-25,
the actual acceleration time = Pr.01-12, 01-14, 01-16, 01-18 + (Pr.01-24 + Pr.01-25) ÷ 2.
When Pr.01-13, 01-15, 01-17, 01-19 ≥ Pr.01-26 and Pr.01-27,
the actual deceleration time = Pr.01-13, 01-15, 01-17, 01-19 + (Pr.01-26 + Pr.01-27) ÷ 2.
Skip Frequency 1 (Upper Limit)
Skip Frequency 1 (Lower Limit)
Skip Frequency 2 (Upper Limit)
Skip Frequency 2 (Lower Limit)
Skip Frequency 3 (Upper Limit)
Skip Frequency 3 (Lower Limit)
Default: 0.00
Settings 0.00–599.00 Hz
Sets the AC drive’s skip frequency. The drive’s frequency setting skips these frequency ranges.
However, the frequency output is continuous. There are no limits for these six parameters and
you can combine them. Pr.01-28 does not need to be greater than Pr.01-29; Pr.01-30 does not
need to be greater than Pr.01-31; Pr.01-32 does not need to be greater than Pr.01-33. Pr.01-28–
01-33 can be set as required. There is no size distinction among these six parameters.
These parameters set the skip frequency ranges for the AC motor drive. You can use this function
to avoid frequencies that cause mechanical resonance. The skip frequencies are useful when a
motor has resonance vibration at a specific frequency bandwidth. Skipping this frequency avoids
the vibration. There are three frequency skip zones available. You can set the Frequency
command (F) within the range of skip frequencies. Then the output frequency (H) is limited to the

 Loading...
Loading...




