Chapter 12 Description of Parameter Settings
ME300
Enable PID to Change the Operation Direction
Default: 0
Settings 0: Operation direction can be changed
1: Operation direction cannot be changed
Default: 0.00
Settings 0.00–600.00 sec.
Refer to Pr.08-18 for more information.
Default: 2
Settings bit 0 = 1, PID running in reverse follows the setting for Pr.00-23.
bit 0 = 0, PID running in reverse refers to PID’s calculated value.
bit 1 = 1, two decimal place of PID Kp
bit 1 = 0, one decimal place of PID Kp
bit 0 = 1: Enable PID running in reverse.
bit 0 = 0: If the PID calculated value is positive, the direction is forward. If the PID calculated
value is negative, the direction is reverse.
When the setting of bit 1 changes, the Kp gain does not change. For example: Kp = 6, when
Pr.08-23 bit 1 = 0, Kp = 6.0; when Pr.08-23 bit 1 = 1, Kp = 6.00.
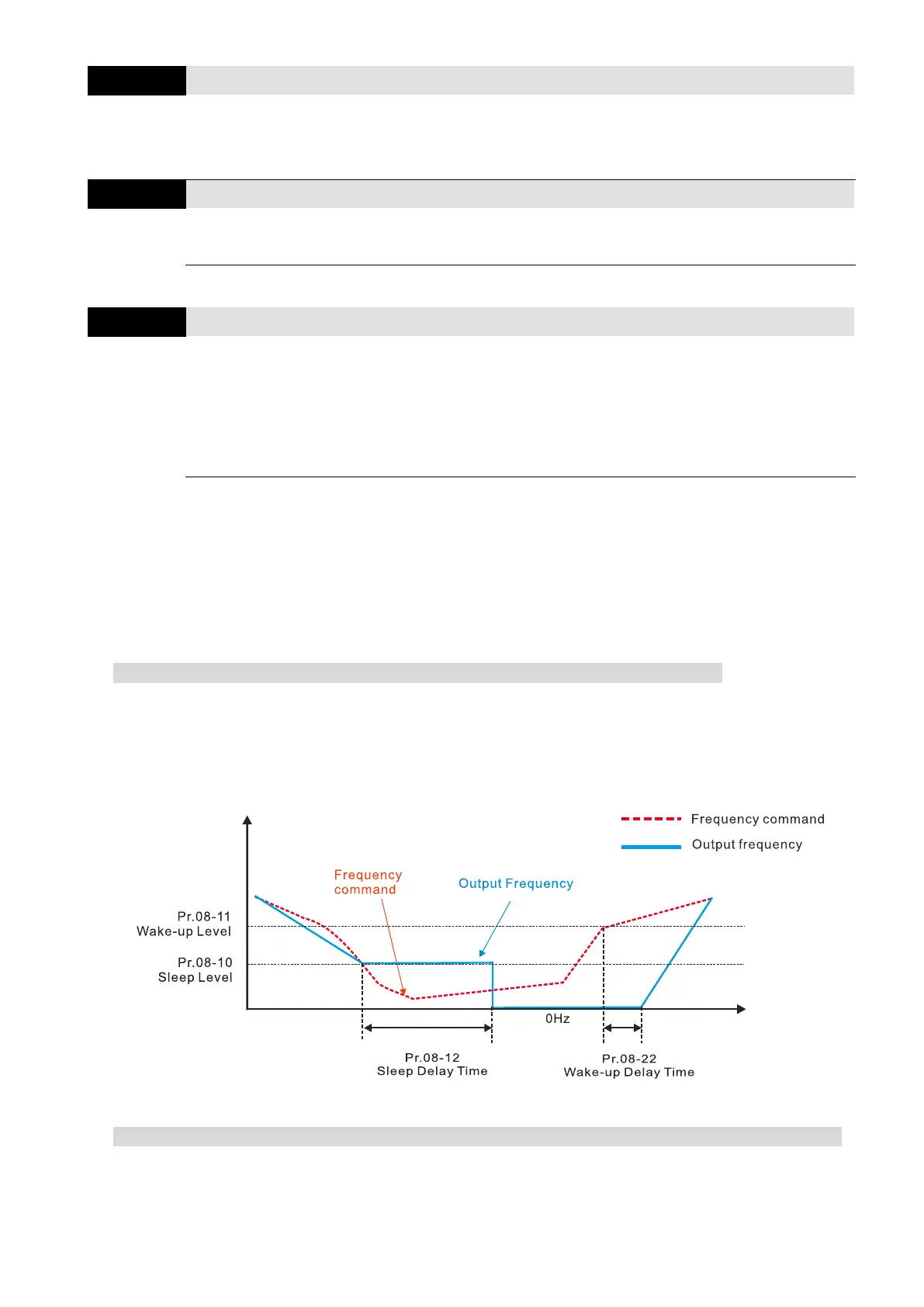
There are three scenarios for sleep and wake-up frequency.
1) Frequency Command (PID is not in use, Pr.08-00 = 0, only works in VF mode)
When the output frequency ≤ the sleep frequency, and the drive reaches the preset sleep time,
then the the drive is in sleep mode (0 Hz). When the frequency command reaches the wake-up
frequency, the drive starts to count the wake-up delay time. When the drive reaches the wake-up
delay time, it starts to catch up to reach the frequency command value by the acceleration time.
2) Frequency Command Calculation of the Internal PID (Use PID, Pr.08-00 ≠ 0 and Pr.08-18 = 0)
When the PID calculation Frequency command reaches the sleep frequency, the drive starts
to count the sleep time and the output frequency starts to decrease. If the drive exceeds the preset
sleep time, then the drive is in sleep mode (0Hz). If the drive does not reach the preset sleep time,

 Loading...
Loading...




