Chapter 12 Description of Parameter Settings
ME300
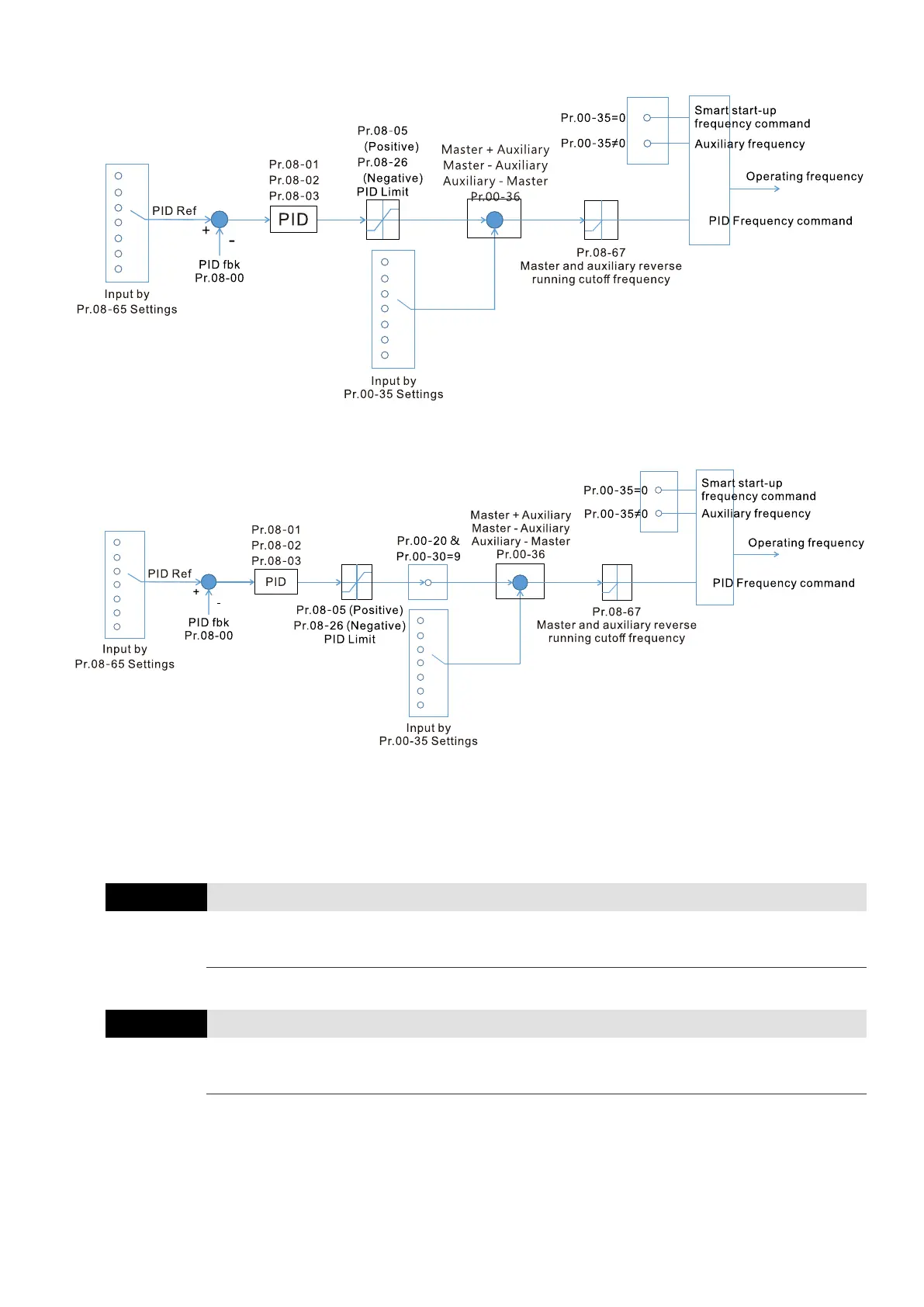
When Pr.08-65 = 0, PID controller architecture diagram as shown below:
When Pr.08-65 ≠ 0, PID controller architecture diagram as shown below:
When Pr.08-65 is not set to 0, Pr.00-20 is automatically set to 9.
When Pr.08-65 is set to 1, PID command can be setting by Pr.08-66; when Pr.08-65 is not set to
1, PID command is displayed from Pr.08-66.
If Pr.08-65 selects 2, 4, and 6, the corresponding communication address is C2003H.
Default: 50.00
Settings -100.00–100.00%
The target value setting of PID controller (Pr.08-66) is a relative value
Master and auxiliary reverse running cutoff frequency
Default: 10.0
Settings 0.0–100.0%
100% corresponds to Pr.01-00 the Maximum operation frequency
In some cases, it is only possible for the PID to control the value setting and the feedback in the
same situation when the PID output frequency is negative (the motor is reversed). However, an
excessively high reversal frequency is not allowed in some cases, and Pr.08-67 is used to
determine the upper limit of the reversal frequency

 Loading...
Loading...




