22
IP2368EN
EN
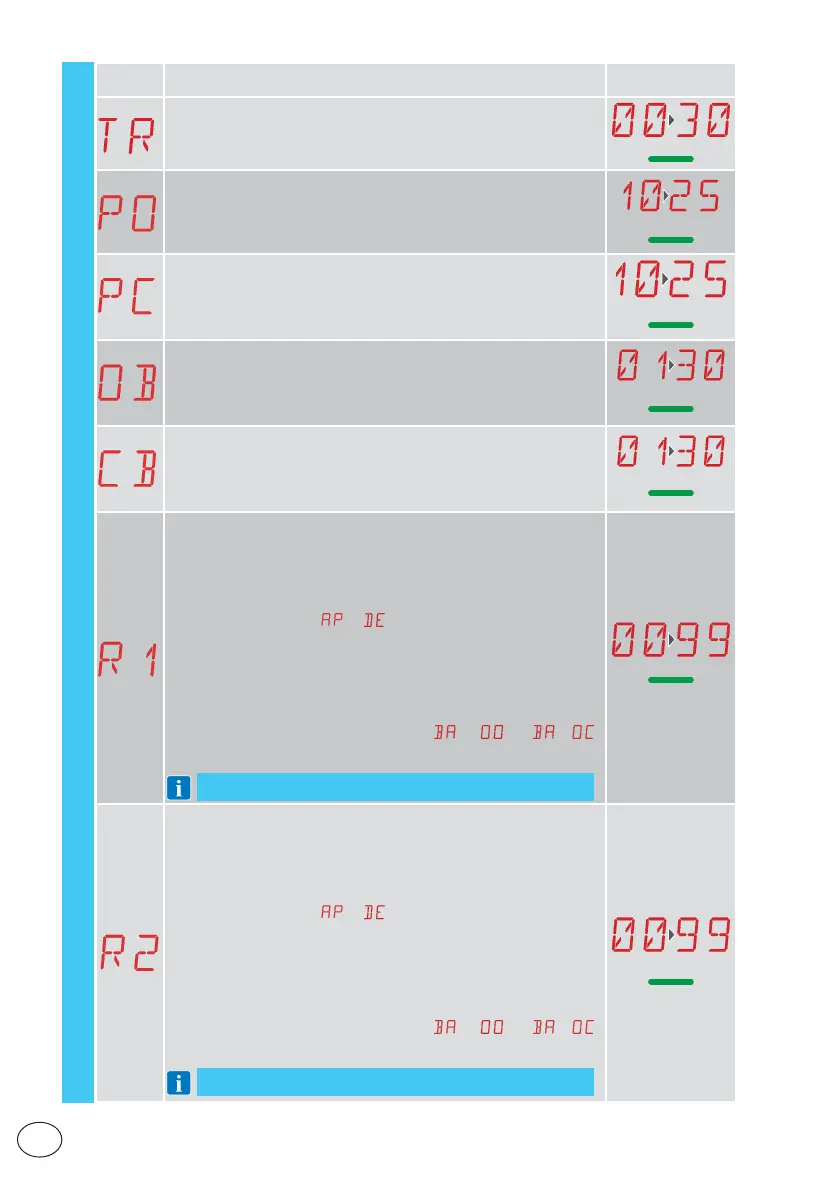
BA - Basic adjustments
Display Description
Selections
available
TR - Motor delay time [s]
Delay time for closure of gate wing 1 in relation to gate wing 2.
00 - 30s
10
PO - Adjustment of approach speed during opening
Indicates the speed from the end of the deceleration ramp to the end of
the opening stroke
10 - Minimum
25 - Maximum
13
PC - Adjustment of approach speed during closing
Indicates the speed from the end of the deceleration ramp to the end of
the closing stroke.
10 - Minimum
25 - Maximum
13
OB - Setting of deceleration/braking time during opening [s]
Indicates the time between the start of the deceleration ramp and the
end of the opening stroke
1 - Minimum
30 - Maximum
10
OB - Setting of deceleration/braking time during closing [s]
Indicates the time between the start of the deceleration ramp and the
end of the opening stroke
1 - Minimum
30 - Maximum
10
R1 - Adjustment of thrust on obstacles during normal operation at
constant speed for both motors when opening. [%]
The control panel is fitted with a safety device which, when it detects
an obstacle:
- stops the opening movement and, if outside the limit area for de-
tecting obstacles, performs a disengagement operation whose du-
ration can be set with
→ ;
- reverses the movement during closure operations outside the limit
area for detecting obstacles;
- stops the movement during closure operations within the limit area
for detecting obstacles.
The limit area for detecting obstacles during opening and closing is de-
termined by the type of limit switch installed. If there is no limit switch,
it is determined according to the selections
→ and → :
00 - Minimum thrust
99 - Maximum thrust
NB:
if set to 99%, obstacle detection is disabled during opening.
10
R2 - Adjustment of thrust on obstacles during normal movement at
constant speed for both motors when closing. [%]
The control panel is fitted with a safety device which, when it detects
an obstacle:
- stops the opening movement and, if outside the limit area for de-
tecting obstacles, performs a disengagement operation whose du-
ration can be set with
→ ;
- reverses the movement during closure operations outside the limit
area for detecting obstacles;
- stops the movement during closure operations within the limit area
for detecting obstacles.
The limit area for detecting obstacles during opening and closing is de-
termined by the type of limit switch installed. If there is no limit switch,
it is determined according to the selections
→ and → :
00 - Minimum thrust
99 - Maximum thrust
NB:
if set to 99%, obstacle detection is disabled during closing.
10