Menu
5
Parameter
structure
Keypad and
description format
Advanced
parameter
descriptions
Serial comms
than the rated level. In speed control the compensation prevents gain reduction at higher speeds. In torque control the compensation maintains the
torque at the correct level for a given torque demand. In some applications using speed control it may be desirable to have a reduction of gain as the
motor flux is reduced to maintain stability. If this is required, Pr
5.28
should be set to one.
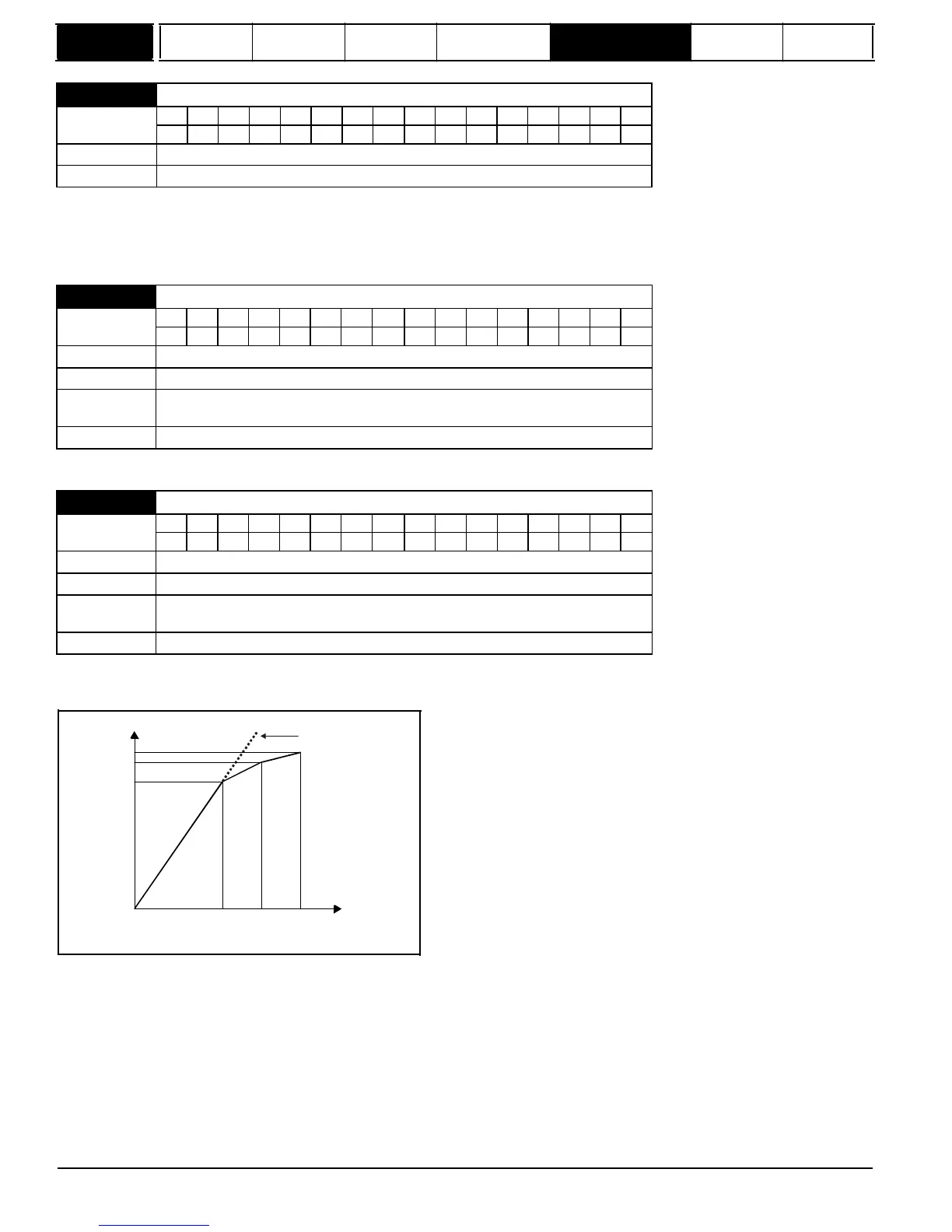
The drive can include the effects of saturation by representing the flux producing current to flux characteristic as a series of three lines as shown
below:
flux (%)
100%
Pr
5.30
Pr
5.29
Linear characteristic
(i.e. no saturation)
50
75
100
Field
current (%)
If Pr
5.29
and Pr
5.30
have their default values of 50 and 75, the characteristic becomes one line and there will be a linear relationship between the
drive estimate of flux and the flux producing current. If Pr
5.29
and Pr
5.30
are increased above 50 and 75 the drive estimate of flux can include the
effect of non-linearity. It is unlikely that information will be available to set up these parameters, and so the values are determined during the rotating
autotune test.
78
Mentor MP Advanced User Guide
www.onxcontrol.com
Issue Number: 4
5.29

 Loading...
Loading...

