Maintenance 9. Replacing Arm #1
G3 Rev.14 149
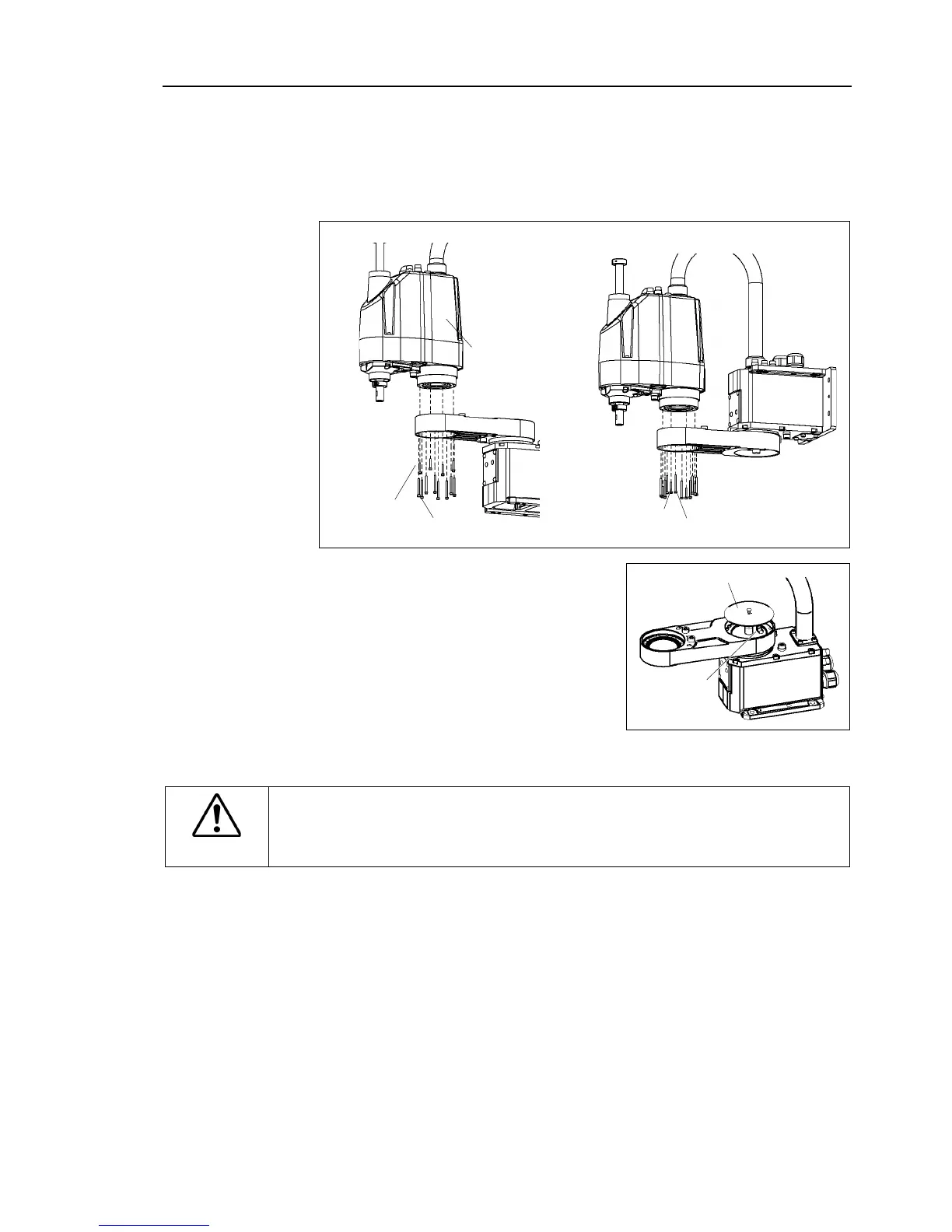
screws and mount the Arm #1 unit with specified torque.
M3 tightening torque: 3.0 N⋅m (30.6 kgf⋅cm)
side and the middle one in each side is 20 mm.
different length. It causes a malfunction.
Mount the hose elbow and Arm #1 cover.
ese parts are not attached to the Multiple
mounting Manipulators.
θ2 movement direction label to the end of Arm #1, in Arm #2 side.
CAUTION
■
After replacing the arm, do not fail to change the robot model in the software.
If the model is different, it may cause a robot to malfunction. Also, the robot
may collide with the mechanical stop and

 Loading...
Loading...






